Department of Agricultural Engineering, Faculty of Engineering, Kuzbass
State Agricultural Academy, Kemerovo, Russia.
Corresponding author email: 191836@mail.ru
Article Publishing History
Received: 14/10/2021
Accepted After Revision: 14/12/2021
The number of threats to the plants is constantly increasing. The harmful impact of pests and plant diseases costs billions of dollars to the global economics each year. Chemical protection of plants from diseases and insects became an urgent problem in crop production, forestry and parks. The study aimed to develop an effective mobile robot for treating trees and shrubs from insects and diseases by spraying with chemicals. The work used monographic and general scientific research methods. A review of existing designs and technologies, as well as an analysis of publications in leading scientific journals, led to the conclusion that there is no one generally accepted technology for remote diagnosis and spot spraying of single trees and shrubs.
Most of the technical means used have significant technical and environmental limitations. Currently, there is no unambiguous decision about which machine and technology to choose for solving the problems of remote diagnostics and spot spraying of single plant objects with a height of 2 to 4 meters. Taking into account the identified requirements, a robotic platform was developed for diagnosing and spot spraying of ornamental and fruit trees and tall shrubs. The developed robot is equipped with the necessary set of equipment for moving around the territory and spraying objects, has an increased cross-country ability, works according to a given program, has a minimal environmental impact, and can record data for diagnosing problems on plants. The proposed universal robot can work in agricultural, forest and urban areas, in warehouses and production facilities.
Plant Protection, Spot Spraying, Universal Robot.
Bykov S. N. Universal Robotic Platform for Diagnosis and Spot Spraying of Trees and Shrubs. Biosc.Biotech.Res.Comm. 2021;14(4).
Bykov S. N. Universal Robotic Platform for Diagnosis and Spot Spraying of Trees and Shrubs. Biosc.Biotech.Res.Comm. 2021;14(4). Available from: <a href=”https://bit.ly/31UXbK4“>https://bit.ly/31UXbK4</a>
Copyright © Bykov This is an open access article distributed under the terms of the Creative Commons Attribution License (CC-BY) https://creativecommns.org/licenses/by/4.0/, which permits unrestricted use distribution and reproduction in any medium, provide the original author and source are credited.
INTRODUCTION
Chemical protection of trees and shrubs from insects and diseases in the form of processing them with special preparations is an urgent problem in crop production, forestry and parks. The processed objects in this case are fruit trees and tall shrubs in agricultural areas, deciduous and coniferous trees in forest plantations and protective belts along agricultural fields, decorative objects in the form of freestanding trees and tall shrubs in parks, squares and other areas in the city. Most often used, mounted and trailed sprayers are used for treating trees and tall shrubs with chemicals. In this case, the main limitations and disadvantages are significant height of the processed objects, high consumption of chemicals during continuous processing with fan sprayers, low efficiency in case of continuous processing, since a significant part of the drug falls on the soil, and not on the leaves and fruits, the obligatory presence of a wide road and a large area for movement and turning of a tractor with a sprayer, the presence of noise and exhaust gases during the operation of the tractor, which is especially undesirable for parks and other recreation areas in cities, damage to lawns from tractor wheels when working in the city, the danger of a moving vehicle for people, especially within the city, the inability to accurately diagnose the degree of damage to a plant object by insects and diseases, especially on the crown of a tree, impossibility to reliably assess the quality of the processing of the object (Ahmad et al. 2020).
Due to the above limitations and technology shortcomings, these machines are usually used in agricultural and forest areas. They are usually unacceptable for the city. One of the options for solving the problem, especially in cities, is modern technologies based on the use of unmanned aerial vehicles. There is a technology for spot processing of plant objects using spray modules installed on unmanned aerial vehicles (Ahmad et al. 2020). However, the use of this technology has significant limitations. The main limitation is the low carrying capacity of the aircraft (no more than 10 kg of the working solution). The second limitation is the high cost of aircraft with the specified payload. The third limitation is the short flight time of the apparatus and the need for regular refueling of the reservoir of the spray module. The fourth limitation is the need to engage a professional aircraft operator (Wang et al. 2020).
The qualifications of such an operator should be higher than in conventional photography of territories, since he is required to be able to construct and program with high accuracy a special trajectory of the aircraft’s flight. This trajectory should take into account the limited flight time of the aircraft, the need to constantly change the flight altitude due to the different heights of the processed objects, the change in the mass and balance of the aircraft due to the gradual flow of fluid. In addition, it is often necessary to legally issue a flight permit, there is a risk of falling and breakdown of the aircraft, there is a dependence of flights on weather conditions, it is impossible to process the vertical and steep surfaces of objects, etc (Wang et al. 2020). We see the solution to the problem in the use of a small-sized mobile robot with equipment installed on it for spraying tall plants.
We carried out a literary review of scientific publications concerning the possible design options for the robot and the technology for spraying plants with it. Based on the modular principle proposed in studies, it is possible to develop a robotic platform that performs a wide range of plant protection tasks (Levin and Degani 2016). This platform can move through the territory on the basis of operator commands from the control panel or with the help of autonomous navigation, built on modern hardware and software, considered in studies (Oltean 2019; Wang et al. 2020).
The choice of the optimal movement mode depends on the type of territory and the characteristics of the objects being processed. Evaluation of the effectiveness of modes of interaction between the operator and the remotely controlled agricultural robot-sprayer can be carried out on the basis of the methodology described in studies (Adamides et al. 2017). An assessment of the characteristics of spraying greenhouse crops with pesticides by a remote-controlled robot was proposed in studies (Rincоn et al. 2020). For us, this article is useful from the point of view of organizing the movement of the robot in a limited area of a small area. The processes of deposition and distribution of the sprayed liquid on the objects to be sprayed and on the ground, depending on the volume of application, the speed of the air flow and the position of the objects, are considered in studies (Musiu et al. 2019; Rincоn et al. 2020).
The described technique can be used to assess the quality of plant spraying by a robot under various process parameters. Aerodynamics and analysis of the quality of liquid spraying during spot spraying by a robot from a close distance using compressed air is considered in studies (Malnersic et al. 2016). For our research, this article is of interest from the point of view of optimizing the parameters of pneumatic and hydraulic systems that regulate the intensity and shape of the fluid sprayed by the robot. The work by Oberti et al. (2016) is devoted to spot spraying of bushes in the fight against diseases using a modular agricultural robot. The results presented in it can be useful in creating hardware and software tools for diagnosing the state of the processed object and making a decision by the robot about spot spraying of the plant surface. The design synthesis and analysis of the working space of a telescopic robot sprayer is considered in studies (Zu-Yun et al. 2019). For us, this article is interesting from the standpoint of developing the design of a vertical telescopic boom for spraying tree crowns. An important factor in increasing the efficiency of the robot sprayer is the development of adequate systems that allow assessing the degree of damage to plants by insects and diseases, as well as systems for automated analysis of the geometric characteristics of the processed object (Rincоn et al. 2020).
The method of multifunctional analysis of a tree trunk in a garden using a camera and ultrasonic sensors is described in studies (Chen et al. 2018). Intelligent spraying systems based on various sensors in agriculture are considered in studies (Abbas et al. 2020). An intelligent robotic sprayer based on plant volume is proposed in studies. The information presented in these articles was useful when choosing sensors and cameras in the diagnostic systems of the robotic platform we developed. When operating the robot sprayer, the safety requirements must be observed. The possible effect on the skin of operators using pesticides when spraying crops is discussed in studies (Rincon et al. 2018; Hejazipoor et al. 2021). The issues of safety and ergonomics of interactive agricultural human and robot operations are described in studies (Benos et al. 2020). The materials of these articles were taken into account when developing instructions for the safe operation of the developed robotic platform.
MATERIAL AND METHODS
In the presented article, monographic and general scientific research methods were used. The materials for the study were publications in leading scientific journals.
RESULTS AND DISCUSSION
The main requirements for the functioning of the developed robotic platform for diagnosing and spot treatment of trees and tall shrubs were increased cross-country ability, the ability to move from one processing object to another according to a given program or from a remote control panel, the ability to navigate in space, taking into account the boundaries of the cultivated area and the presence of obstacles in the form of shrubs, trees, poles, fences and other objects on the territory, minimal harmful impact on the environment, high safety for the operator and other personnel on the territory, continuity of autonomous operation without recharging the batteries for at least ten hours, the ability to process objects up to 4 m high, the possibility of photographing and video filming of plant objects for their diagnosis and decision-making on the need and intensity of chemical treatment, the minimum duration of the working cycle (moving to the object, lifting the vertical bar to the desired height, monitoring the object, diagnosing a possible problem, processing the object by spraying, recording the results of diagnostics and chemical processing on an electronic carrier, lowering the vertical bar to its initial position) (Hejazipoor et al. 2021).
Taking into account the literature review and the above basic requirements, we have designed and manufactured a prototype of a robotic platform for diagnosing and spot spraying trees and tall shrubs. A conceptual diagram of a robotic platform is shown in Figure 1.
Figure 1: Scheme of a robotic platform for high-altitude diagnostics and spot processing:
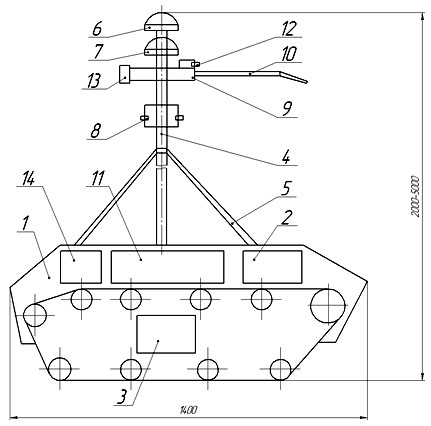
1 – chassis; 2 – gear motor; 3 – battery pack; 4 – vertical telescopic bar; 5 – diagonal support; 6 – antenna; 7 – additional antenna; 8 – transport video cameras; 9 – working body; 10 – horizontal rod of the working body with nozzles; 11 – hydraulic equipment; 12 – balancer of the working body; 13 – control unit for movement, spraying, vertical boom, video cameras.
All operating actuators, diagnostic equipment and control equipment of the robotic platform were installed on chassis 1. Moving across the territory between the objects of processing was carried out by two onboard caterpillar propellers, each of which was driven by an individual DC electric motor 2. The power of the electric motors 2 was carried out from the battery pack 3. A vertical telescopic rod 4 was installed on the chassis. The height of the stays was remotely changed from 2 to 5 meters thanks to linear drives (electric actuators). The stability of the bar was ensured by four diagonal supports 5, which were rigidly fixed to the bar 4 at a height of 1.5 m (Rincоn et al. 2020).
An antenna 6 was installed at the highest point of the stays 4 for receiving and transmitting signals to the operator. An additional antenna 7 was fixed next to it to expand the functionality of the robotic platform. In the upper part of the boom 4 there were several video cameras 8 broadcasting the image to control the trajectory of movement. In addition to video cameras, radars, lidars, GPS-module and other modern equipment were installed to optimize the route. Between the video cameras 8 and the additional antenna 7, a working body 9 was installed for spraying shrubs and trees with a height of 1 to 4 meters.
The range and angle of spraying, the shapes of the spray pattern were provided by a remotely controlled horizontal boom 10 with nozzles. The supply of working fluid to the nozzles was carried out by remotely controlled hydraulic equipment 11, including a reservoir with a chemical solution, a hydraulic pump, an electric motor of a hydraulic pump, hydraulic valves. Monitoring of the state of vegetation and quality control of processing objects was provided by a video camera 12 of the working body.
Compensation of the cantilever arrangement of the horizontal rod of the working body was carried out by a symmetrically located balancer 13. The control unit 14 performed the function of processing and fixing information about the position of the robotic platform, the speed of movement, the presence of obstacles on the route and on the horizon. This block, in addition to the motion control function, also controlled the working body 9, the vertical bar 4, and video cameras. The chassis of the robotic platform consisted of two independent tracked propellers 1 connected by a replaceable frame 2 (Figure 2) (Rincоn et al. 2020).
Figure 2: Chassis of the robotic platform. 1 – independent tracked mover; 2 – replaceable frame.
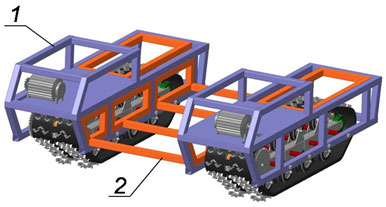
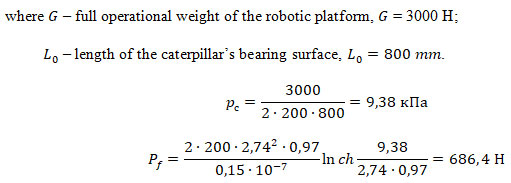
This arrangement simplified the design that provided high maneuverability and maneuverability of the machine. This increased its versatility due to the variable track width. A significant influence on the performance of the robotic platform was exerted by the resistance force due to the interaction of its running systems with the soil surface. For the selection of electric motors and batteries, the resistance force to the movement of the developed robotic platform was determined. The main part of the above force was the resistance force arising from the deformation of the soil by tracks, determined by the formula:
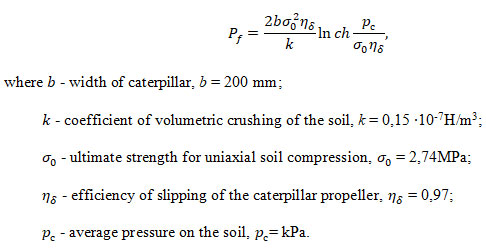
With a uniform distribution of pressure along the length of the support branch of the track, the value of the average pressure was determined by the formula:

In real conditions, the robotic platform periodically moves uphill. The second part of the resistance force, taking into account the upward movement, was determined by the formula:
![]()
where α– maximum slope of the agricultural area, = 10°.
![]()
The total force of movement resistance of the robotic platform was determined by the formula:
The required total power of the drive motors of the robotic platform was determined by the formula:

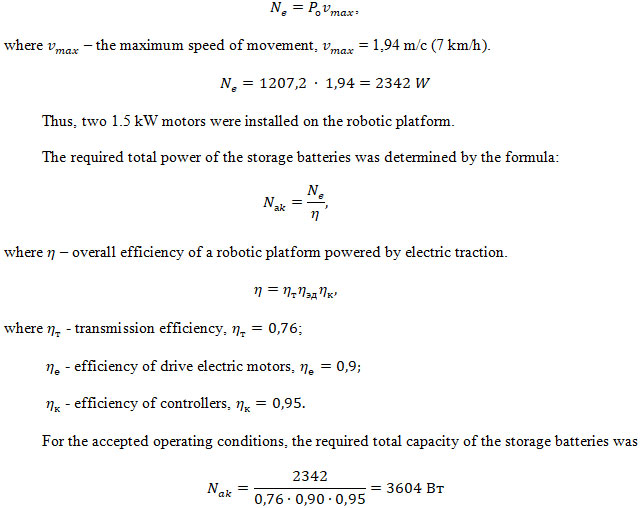
Based on the calculations performed, the choice of specific brands of electric motors and batteries was made. DC motors of the above power were installed on the robotic platform, providing stepless speed control. Taking into account the additional energy consumption (for the electric motor of the sprayer pump, for the operation of video cameras, vertical boom actuators, control equipment, etc.), as well as the fact that the average power consumed by the robotic platform during operation was about 30% of the maximum, accumulators with a total capacity of 300 A∙h (Abbas et al. 2020).
This ensured continuous operation for ten hours. After that, the batteries were charged, which was performed simultaneously with other daily maintenance work on the robotic platform. To achieve high performance of the robotic platform, gel batteries were installed. Their main advantages were: long service life, a large number of charging cycles, no need for urgent charging in the event of a deep discharge, small capacity losses during idle time, safety of operation due to the impermeability of the case. It should be noted that one of the advantages of the robotic platform was the ability to install a replaceable central section.
Three sections were manufactured, providing track widths of 700, 900 and 1100 mm. This allowed the track gauge to be changed at no significant cost to meet new challenges. An essential factor in the safe operation of a robotic platform was its lateral and longitudinal stability when moving over an area with a slope. The lateral stability calculations of the robotic platform were performed for the narrowest center section (Abbas et al. 2020). The design scheme is shown in Figure 3.
Figure 3: Scheme for calculating the lateral stability of a robotic platform
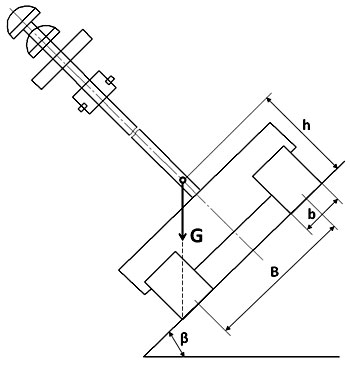
Preliminarily, at a special stand, measures were taken to determine the height of the center of gravity of the robotic platform without a vertical boom and equipment for diagnostics and spraying installed on it. At the stand, it was revealed that with a transverse tilt, a robotic platform with a minimum track width of B = 0.7 m loses its stability at an angle βo = 53°.
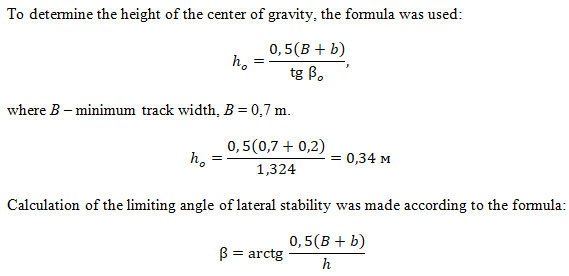
Further, the value of the angle β was determined for a robotic platform with vertical rods 2 and 5 m high. Intermediate calculations showed that when equipped with these rods, the height of the center of gravity was, respectively, h2 = 0.42 m, h5 = 0.52 m.
Since the motors were installed in the front of the robotic platform, the center of gravity was shifted forward along the longitudinal axis. The displacement value was determined on a special stand and amounted to a = 0.04 m. The design scheme is shown in Figure 4.
Figure 4: Scheme for calculating the longitudinal stability of a robotic platform
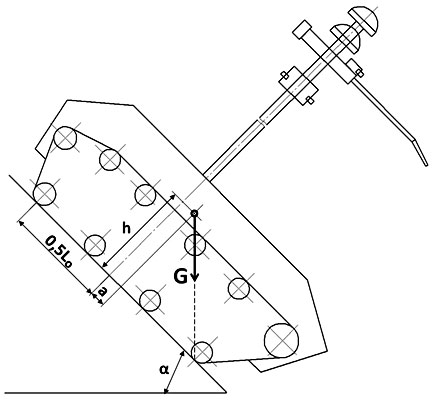
Calculation of the limiting angle of longitudinal stability was carried out according to the formula:
The calculation results showed that the limiting angles of longitudinal stability were less than the angles of lateral stability. Particularly dangerous from the point of view of overturning was the robotic platform movement down the slope. Taking into account that agricultural areas usually have slopes of no more than 10°, and then the calculated critical angle of 35° provided the robotic platform with guaranteed stability even with a maximum height of the vertical telescopic rod of 5 m. The robotic platform had a high degree of versatility. It allowed not only to diagnose problems and to carry out pinpoint processing of plant objects from 1 to 4 meters in height in fields and gardens (Abbas et al. 2020).
This robot diagnosed and spotted treatment with special anti-corrosion and antiseptic solutions, foci of corrosion on the roofs of one-story buildings, foci of corrosion and mold on ventilation and water supply systems, on the walls and ceilings of warehouses, garages, elevators, livestock farms, etc. The treatment of trees and shrubs from insects and diseases by spraying with chemicals was an important factor in maintaining the health and longevity of these plants, as well as consistently obtaining high yields.
Most of the technologies and machines used for this (spraying modules on unmanned aerial vehicles, mounted and trailed sprayers, etc.) were characterized by high economic costs, have technical and environmental restrictions. Therefore, for agriculture, these technologies and machines in a number of cases require justification, and for urban conditions they were often generally unacceptable (Wang et al. 2020).
CONCLUSION
The findings of the present study showed that the developed robot has an increased cross-country ability due to a caterpillar propeller, can move between processing objects according to a given program and from a remote control panel, is able to navigate in space, taking into account the boundaries of the processed area and the presence of obstacles, due to the use of an electric drive, it has a minimal environmental impact, is able to take photographs and video filming of objects to diagnose problems. The developed robot is versatile; it can be used in agriculture, in urban park areas, in warehouses and production facilities.
REFERENCES
Abbas, I, Liu, J and Faheem M (2020). Different sensor based intelligent spraying systems in Agriculture. Sensors and Actuators A: Physical Vol 316 Article 112265 DOI: 10.1016/j.sna.2020.112265.
Adamides, G, Katsanos, C and Parmet, Y (2017). HRI usability evaluation of interaction modes for a teleoperated agricultural robotic sprayer Applied Ergonomics Vol 62 Pages 237-246. DOI: 10.1016/j.apergo.2017.03.008.
Ahmad, F, Qiu, B and Chandio, F (2020). Effect of operational parameters of UAV sprayer on spray deposition pattern in target and off-target zones during outer field weed control application. Computers and Electronics in Agriculture Vol 172 Article 105350. DOI: 10.1016/j.compag.2020.105350.
Benos, L, Bechar, A and Bochtis, D (2020). Safety and ergonomics in human-robot interactive agricultural operations Biosystems Engineering Vol 200 Pages 55-72 DOI: 10.1016/j.biosystemseng.2020.09.009.
Chen, X, Wang, S and Zhang, B (2018). Multi-feature fusion tree trunk detection and orchard mobile robot localization using camera/ultrasonic sensors Computers and Electronics in Agriculture Vol 147 Pages 91-108 DOI: 10.1016/j.compag.2018.02.009.
Hejazipoor, H, Massah, J and Soryani, M (2021). An intelligent spraying robot based on plant bulk volume Computers and Electronics in Agriculture Vol 180 No 3 Article 105859 DOI: 10.1016/j.compag.2020.105859.
Levin, M and Degani, A (2016). Design of a Task-Based Modular Re-Configurable Agricultural Robot. IFAC-Papers OnLine, Vol 49 No 16 Pages 184-189. DOI: 10.1016/j.ifacol.2016.10.034.
Malnersic, A, Dular, M and Sirok, B (2016). Close-range air-assisted precision spot-spraying for robotic applications: Aerodynamics and spray coverage analysis Biosystems Engineering Vol 146 No 16 Pages 216-226 DOI: 10.1016/j.biosystemseng.2016.01.001.
Musiu, E, Qi, L and Wu, Y (2019). Spray deposition and distribution on the targets and losses to the ground as affected by application volume rate, airflow rate and target position. Crop Protection Vol 116 Pages 170-180 DOI: 10.1016/j.cropro.2018.10.019.
Oberti, R, Marchi, M and Tirelli, P (2016). Selective spraying of grapevines for disease control using a modular agricultural robot Biosystems Engineering Vol 146 Pages 203-215 DOI: 10.1016/j.biosystemseng.2015.12.004.
Oltean, S (2019). Mobile Robot Platform with Arduino Uno and Raspberry Pi for Autonomous Navigation Procedia Manufacturing Vol 32 Pages 572-577 DOI: 10.1016/j.promfg.2019.02.254.
Rincon, V, Paez, F, and Sanchez-Hermosilla, J (2018). Potential dermal exposure to operators applying pesticide on greenhouse crops using low-cost equipment Science of The Total Environment Vol 630 Pages 1181-1187 DOI: 10.1016/j.scitotenv.2018.02.235.
Rincоn, V, Grella, M and Marucco, P (2020). Spray performance assessment of a remote-controlled vehicle prototype for pesticide application in greenhouse tomato crops Science of The Total Environment Vol 726 Article 138509. DOI: 10.1016/j.scitotenv.2020.138509.
Wang, G, Han, Y and Li, X (2020). Field evaluation of spray drift and environmental impact using an agricultural unmanned aerial vehicle (UAV) sprayer Science of The Total Environment Vol 737 Article 139793. DOI: 10.1016/j.scitotenv.2020.139793.
Zu-Yun, L, Dong-Jie, Z and Jing-Shan, Z (2019). Structure synthesis and workspace analysis of a telescopic spraying robot Mechanism and Machine Theory Vol 133 Pages 295-310 DOI: :10.1088/1742-6596/2050/1/012018.

