
Deep learning techniques and their applications: A
short review
Vaibhav Kumar and M L Garg
Department of Computer Science & Engineering, DIT University, Dehradun, India
ABSTRACT
In recent years, there is a revolution in the applications of machine learning which is because of advancement and intro-
duction of deep learning. With the increased layers of learning and a higher level of abstraction, deep learning models
have an advantage over conventional machine learning models. There is one more reason for this advantage that there
is a direct learning from the data for all aspects of the model. With the increasing size of data and higher demand to
nd adequate insights from the data, conventional machine learning models see limitations due to the algorithm they
work on. The growth in the size of data has triggered the growth of advance, faster and accurate learning algorithms.
To remain ahead in the competition, every organization will de nitely use such a model which makes the most accurate
prediction. In this paper, we will present a review of popularly used deep learning techniques.
KEY WORDS: DEEP LEARNING, MACHINE LEARNING, NEURAL NETWORKS
699
Biomedical
Communication
Biosci. Biotech. Res. Comm. 11(4): 699-709 (2018)
INTRODUCTION
Deep learning, a family of machine learning algorithms,
is inspired by the biological process of neural networks
is dominating in many applications and proving its
advantage over conventional machine learning algo-
rithms (Goodfellow et al, 2016). It is only because of
their capability in producing faster and more accurate
results. It attempts to model high-level abstraction in
data based on a set of algorithms (Deng et al, 2014). In
deep learning techniques, there is a direct learning from
the data for all aspects of the model. It starts with low-
est level features that present a suitable representation
of the data. It then provides higher-level abstractions
for each of the speci c problem in which it is applied.
Deep learning becomes more useful when the amount
of training data is increased. The development of deep
learning models has increased with the increase in the
software and hardware infrastructure (Aghdam et al.,
2017, Nisbet et al, 2018).
ARTICLE INFORMATION:
Corresponding Authors: vaibhav05cse@gmail.com
Received 19
th
Sep, 2018
Accepted after revision 23
rd
Dec, 2018
BBRC Print ISSN: 0974-6455
Online ISSN: 2321-4007 CODEN: USA BBRCBA
Thomson Reuters ISI ESC / Clarivate Analytics USA
Mono of Clarivate Analytics and Crossref Indexed
Journal Mono of CR
NAAS Journal Score 2018: 4.31 SJIF 2017: 4.196
© A Society of Science and Nature Publication, Bhopal India
2018. All rights reserved.
Online Contents Available at: http//www.bbrc.in/
DOI: 10.21786/bbrc/11.4/22

Nitesh Malhotra and Aksh Chahal
700 DEEP LEARNING TECHNIQUES AND THEIR APPLICATIONS BIOSCIENCE BIOTECHNOLOGY RESEARCH COMMUNICATIONS
Deep learning models use multiple layers which are
the composition of multiple linear and non-linear trans-
formations. With the increase in the size of data, or with
the developments in the eld of big data, conventional
machine learning techniques have shown their limita-
tion in analysis with the size of data (Chen, 2014). Deep
learning techniques have been giving better results in
this task of analysis. This technique has been introduced
worldwide as breakthrough technology because has dif-
ferentiated machine learning techniques working on old
and traditional algorithms by exploiting more human
brain capabilities.It is useful in modeling the complex
relationship among data. Instead of working on task-
speci c algorithms it is based on learning data represen-
tations. This learning can be supervised, unsupervised or
semi-supervised, (Hoff, 2018).
In deep learning models, multiple layers composed of
non-linear processing units perform the task of feature
extraction transformation. Every layer takes the input
as the output of its corresponding previous layer. It is
applied in classi cation problems in a supervised man-
ner and in pattern analysis problems in an unsupervised
manner. The multiple layers which provide the high-level
abstraction, form a hierarchy of concepts. There are deep
learning models which are mostly based on arti cial neu-
ral networks which are organized layer-wise in deep gen-
erative models. The concept behind this distributed repre-
sentation is the generation of observed data through the
interaction of layered factors. The high-level abstraction
is achieved by these layered factors. A different degree of
abstraction is achieved by varying the number of layers
and the size of layer (Najafabadi et al, 2015).
The abstraction is achieved through learning from the
lower level by exploiting the hierarchical exploratory
factors. By converting the data into compact immediate
representations of principal components and removing
redundancies in representation through derived layered
structures, the deep learning methods avoid feature engi-
neering in supervised learning applications. In unsuper-
vised learning where unlabeled data is more abundant
than labeled data, deep learning algorithms can be applied
to such kind of problems. The deep belief networks are
the example of deep learning model which are applied to
such unsupervised problems, (Auer et al., 2018).
Deep learning algorithms exploit the abstract repre-
sentation of data which is because of the fact that more
abstract repetitions are based on less abstraction. Due to
this fact, these models are invariant to the local changes in
the input data. This has the advantage in many pattern rec-
ognition problems. This invariance helps the deep learning
models feature extraction in the data. This abstraction in
representation provides these models the ability to separate
the different sources of variations in data. The deep learn-
ing models outperform old machine learning models by
manually de ning the learning features. This is because of
the fact that it relies on human domain knowledge rather
than relying on available data and the design of models
are independent of the system’s training.
There are many deep learning models developed by
the researchers which give a better learning from the
representation o arge-scaleunlabeled data. Some popu-
lar deep learning architectures like Convolutional Neu-
ral Networks (CNN), Deep Neural Networks (DNN), Deep
Belief Network (DBN) and Recurrent Neural Networks
(RNN) are applied as predictive models in the domains
of computer vision and predictive analytics in order to
nd the insights from data. With an increase in the size
of data and necessity of producing a fast and accurate
result, deep learning models are proving their capabili-
ties in the task of predictive analytics to address the data
analysis and learning problems.
Since, there are various deep learning techniques are
in existence and each of these has a speci c application
due to their working model. So, it is necessary to review
these models based on their working and applications.
In this paper, we now present a review of popular deep
learning models focused on arti cial neural networks.
We will discuss ANNs, CNNs, DNNs, DBNs,and RNNs
with their working and application.
ARTIFICIAL NEURAL NETWORK
Arti cial Neural Network is a computational model
inspired by the biological neural networks. Billions of neu-
rons are connected together in the biological neural net-
work which receives electrochemical signals from it neigh-
boring neurons. They process these signals and either store
them or forward to the next neighboring neurons in the
network (Yegnarayana, 2018, Garven et al, 2018).
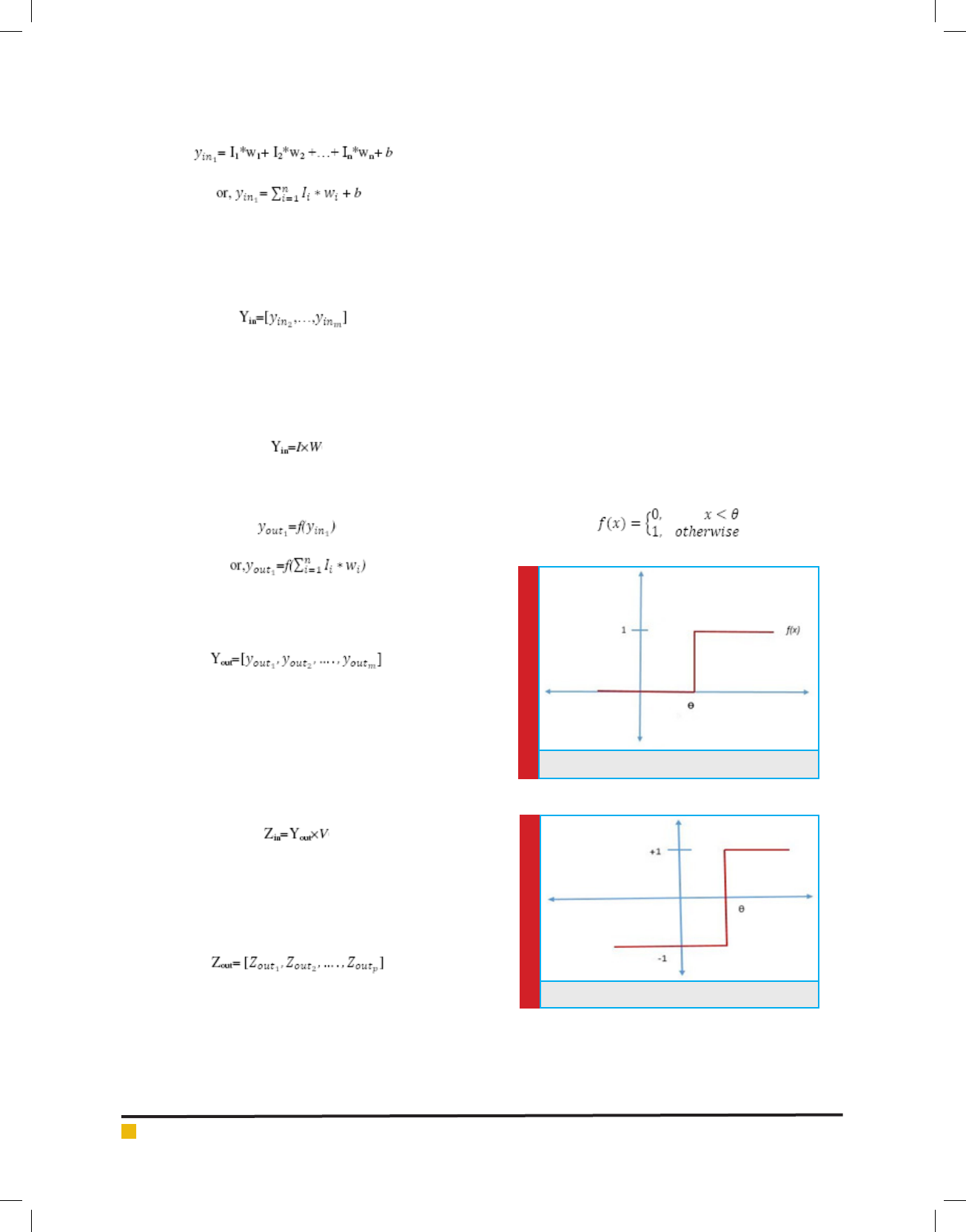
It is represented in gure 1 given below.
Every biological neuron connected to the neighbor-
ing neurons and communicate to eachother. The axons
in the network carry the input-output signals. Theyre-
ceive the inputs from the environment which create the
impulse in form of electrochemical signals which travel
quickly in the network.A neuron may store the informa-
tion or it may forward it to the network. Theytransfer
the information to the neighbors through theirdendrites.
Arti cial neural networks work similarly to the work-
ing of biological neural networks. An ANN is an inter-
connection of arti cial neurons. Every neuron in the
layer is connected to all the neurons of previous and
next layers. There is a weight given as the labels at each
interconnection between neurons.Each neuron receives
input which is the output of neurons of the previous
layer. They process this input and generate an output
which is then forwarded to the neurons of next layer.
There is an activation function used by each neuron of
Nitesh Malhotra and Aksh Chahal
BIOSCIENCE BIOTECHNOLOGY RESEARCH COMMUNICATIONS DEEP LEARNING TECHNIQUES AND THEIR APPLICATIONS 701
the network which collects the inputs, sums the inputs
and generate the output (Hop eld, 1988). There are vari-
ous types of activation functions which are chosen on
the basis of required output.
A simple arti cial neural network is composed of
three layers. The input layer, the hidden layer and the
output layer. The inputs in the form of input vector are
applied to the input layer. The number of neural nodes
in the input layer depends on the number of attributes
in the input. The output of each neuron at input layer is
forwarded to every neuron of hidden layer where they
are received as inputs. The hidden layer is also referred
as the processing layer. Because this is the main layer
where the processing is performed on inputs. The num-
ber of nodes at hidden layer are decided randomly rst
and it may be adjusted during training. The outputs of
each neural node at hidden layer is then forwarded to
output layer where they are received as inputs. The out-
put layer then generates the output which is collected as
nal output of the network. The number of nodes at out-
put layer depends on the type of output(Abraham, 2005).
In classi cation problems, the number of nodes are same
as the number of classes the inputs are to be assigned. In
regression problems, there may be only output node to
produce an output value.
On the basis of layers, there are two types of feed-
forward arti cial neural networks. The rst type is the
single layer feed-forward ANN and the second type is
the multilayer feed forward neural network. In a single
layer, there is no any hidden layer in the network. It
is the simplest kind of neural network. The network is
composed of the input layer and the output layer only.
The inputs applied to the input layers are directly for-
warded to the output layer for generating the outputs.
applications. A feed-forward network is one where the
signals travel in one direction only that is the forward
direction, means from the input layer to the output layer
(Bebis et al, 1994). There are feed-backward or feedback
neural networks which we will discuss later in this chap-
ter. Every neural network works on some learning algo-
rithm.
There are various types of learning algorithms which
are selected depending on the problem to which the net-
work is being used. The training of the networks is done
by implementing the learning algorithm. Backpropaga-
tion learning algorithm is very popular and applied in
many applications to train the neural network. It adjusts
the weight of interconnections using error in output at
a layer. This error is propagated in the backward direc-
tion to the previous layers. That is why it is called back-
propagation algorithm (Buscema, 1998). There are many
other algorithms for each supervised and unsupervised
training of the network. The architecture of a feed-
forward neural network is represented in gure 2 given
below.
FIGURE 1. Biological Neural Network
FEED-FORWARD ARTIFICIAL
NEURAL NETWORK
There are various types of arti cial neural networks each
has a speci c property and can be applied in a differ-
ent problem domain. Feed-forward structure of arti cial
neural networks have been used very popularly in many
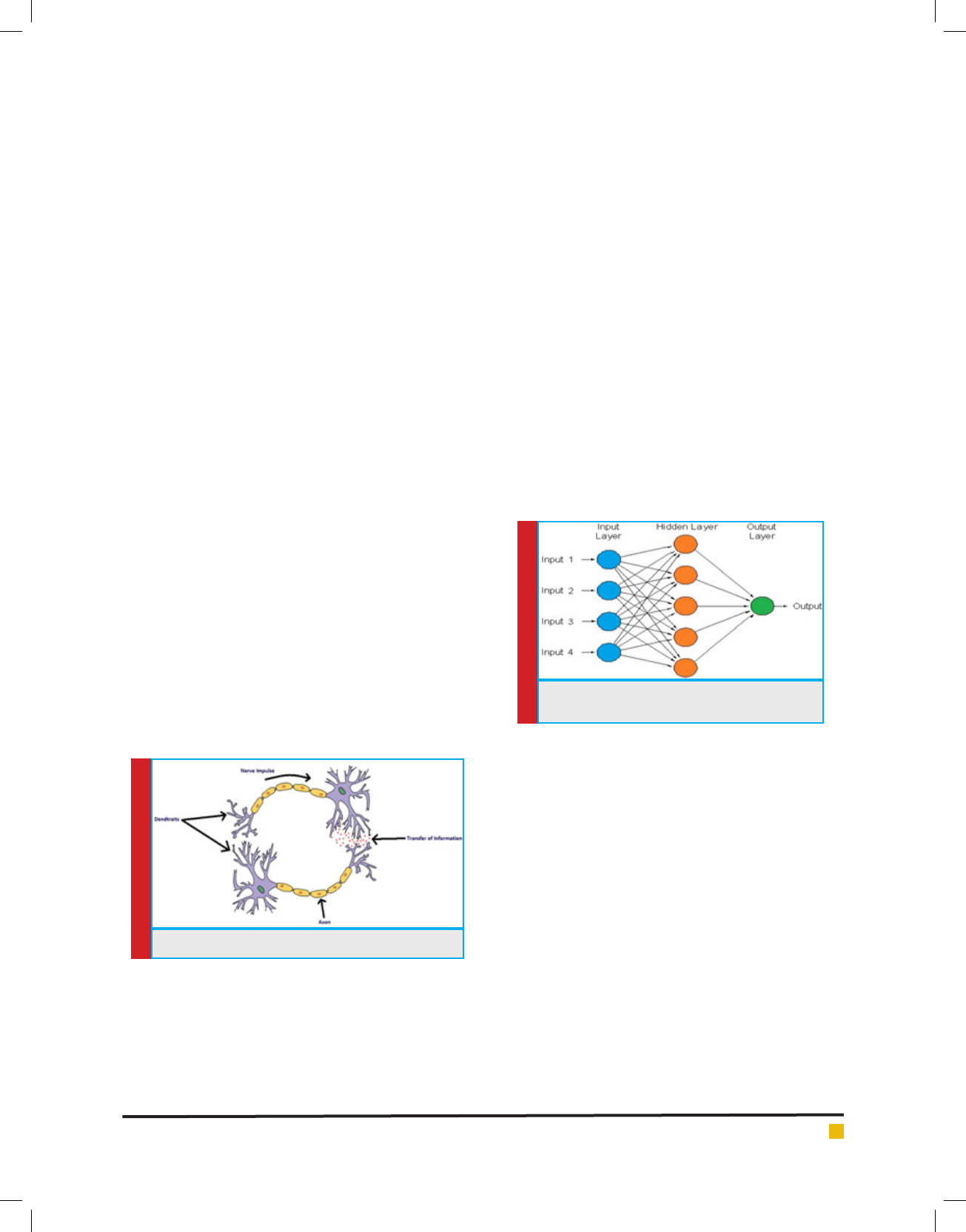
FIGURE 2. Feed-Forward Arti cial Neural
Network
In above gure, the architecture of a feed-forward
neural network is represented. This network is a compo-
sition of arti cial neurons where every neuron is con-
nected to the neurons of its previous and next layers.
During training of the network, the inputs in form of a
vector are applied to the vector of neural nodes at input
layer. In many learning algorithms, a bias input is also
applied to the main input. This bias value is xed during
the training. The rst input pattern is applied and it is
transferred to the hidden layer. The activation function
used at neurons generate the output which is collected
at the output layer. In classi cation problems, the step
functions are generally used and in regression problems,
the logistic problems are used. The training of the net-
work is performed on the dataset in many epochs. Some
algorithms use gradient descent to stop the training pro-
cess after reaching to certain error.
Let the inputs I
1
, I
2
… , I
n
are applied to the input layer
of the network, then the net input received at a single
neuron ofhidden layer is:
Nitesh Malhotra and Aksh Chahal
702 DEEP LEARNING TECHNIQUES AND THEIR APPLICATIONS BIOSCIENCE BIOTECHNOLOGY RESEARCH COMMUNICATIONS
Where w is the weight on interconnection and b is the
bias value, and hence the net input received at the hid-
den layer, if there are m neurons, is represented in the
form of a vector as:
values reach toa certain threshold, the neurons start r-
ing the output which is called that the neuron is acti-
vated. For this activation, a function is used which maps
the net input received to the neuron with the output.
This function is called the activation function. There are
various types of activation functions used at neurons
depending on the problem to which the neural network
is being applied (Roy, Chakraborty, 2013). The popularly
used activation functions are the step function and the
sigmoid function. Here we will present a brief descrip-
tion of these functions.
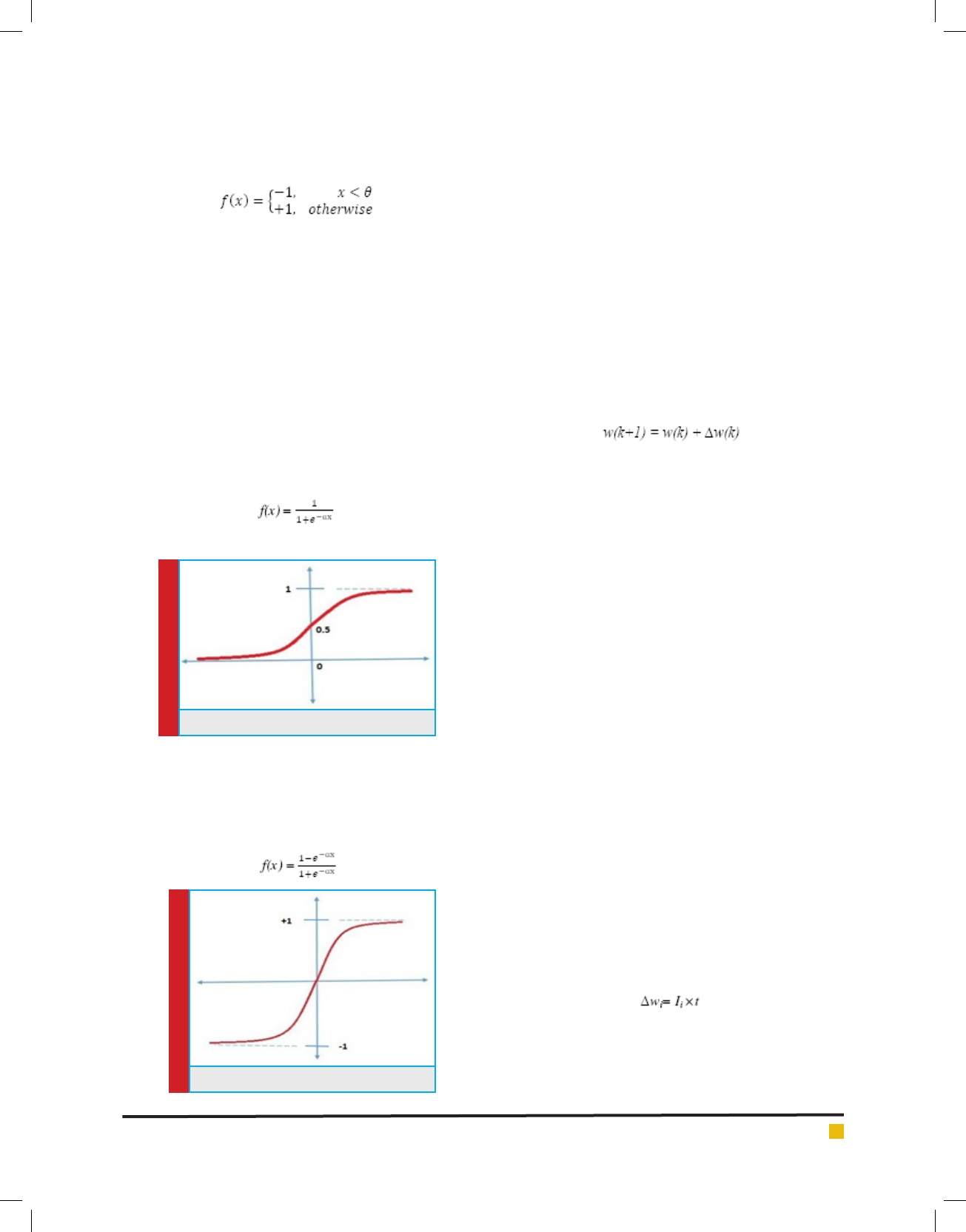
STEP FUNCTION
There are two types of step functions, the binary step
function,and the bipolar step function. The binary step
function produces 0 as the output if the net input is
less than the certain threshold value otherwise, it pro-
duces 1 as the output.It can be represented mathemati-
cally as given in equation 10 and graphically as given in
gure 3.
(1)
(2)
(3)
Let the inputs are represented in the form of the vector
as I = (I
1
, I
2
… , I
n
) and W is the matrix of weights associ-
ated with the interconnections between the input layer
and the hidden layer then Y
in
will be de ned as the cross
product of the input vector and the weight matrix, i.e.,
(4)
If f is the activation function used at this neuron, then
the output of the neuron is obtained as:
(5)
Similarly, the output generated by all the neurons of the
hidden layer can be represented in the form of a vector
as:
(6)
(7)
Now, this output Y
out
is supplied as input to each neuron
of the output layer. Let V is the matrix of weights associ-
ated with the interconnections between the hidden layer
and the output layer then the input received at output
layer will be the cross product of Y
out
and V. Let Z
in
is the
net input received at output layer, then it can be repre-
sented as:
(8)
Let is the output generated by each of the i
th
neuron at
output layer and there are p number of nodes are there
at this layer, then the net output collected at output layer
can be represented as the vector of outputs generated by
each neuron. It can be given as:
(9)
ACTIVATION FUNCTIONS
Every neuron in the neural network generates the out-
put which is referred as the activation of the neuron.
Initially, when the neurons are not generating any out-
put are said to be not activated. When the applied input
(10)
FIGURE 3. Binary Step Function
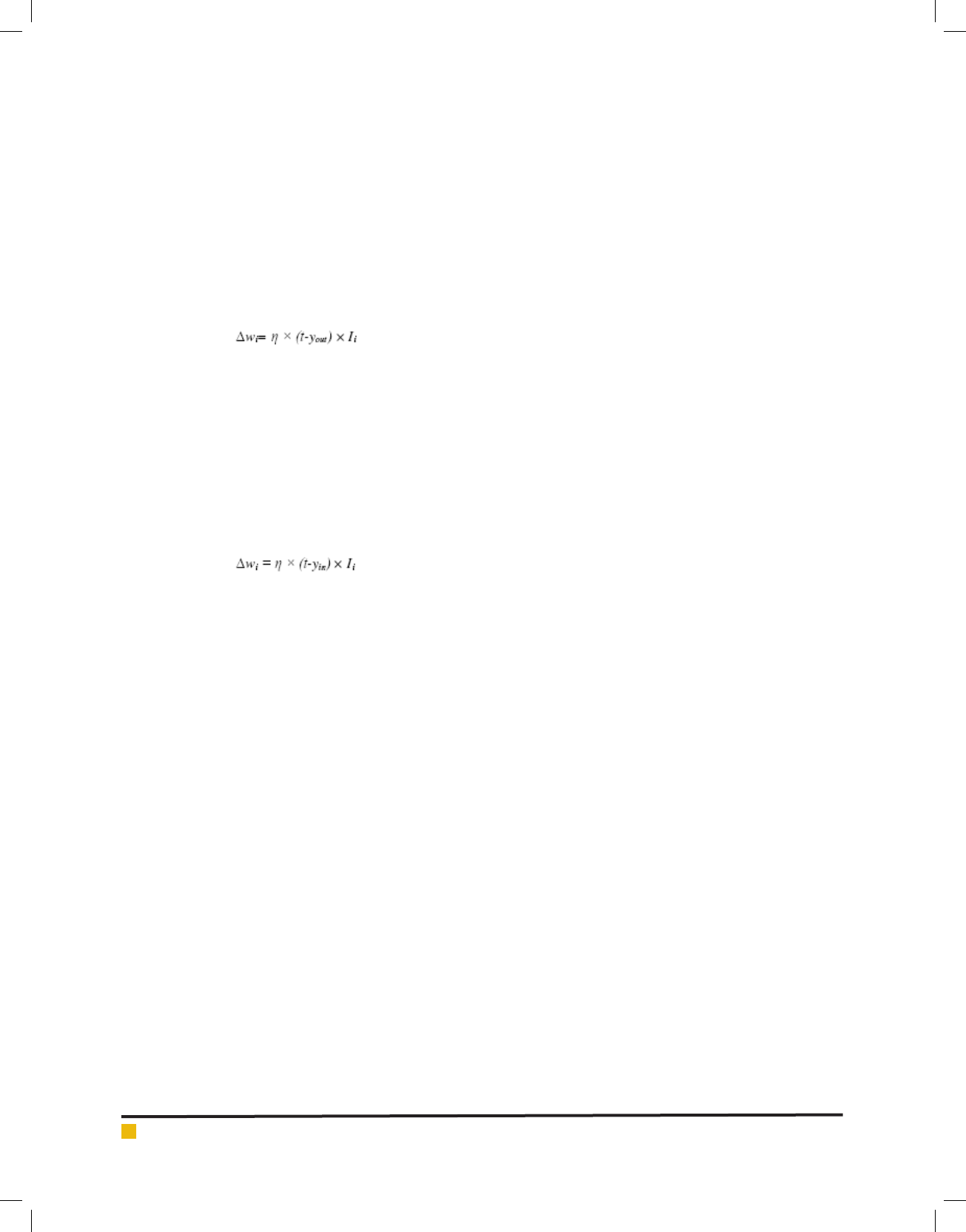
FIGURE 4. Bipolar Step Function
The bipolar step function is used when the neural net-
work is to be applied to bipolar data instead of binary
data. This function gives -1 and + 1 as the output in
place of 0 and 1 depending on the threshold. This func-
Nitesh Malhotra and Aksh Chahal
BIOSCIENCE BIOTECHNOLOGY RESEARCH COMMUNICATIONS DEEP LEARNING TECHNIQUES AND THEIR APPLICATIONS 703
tion can be represented mathematically as given in
equation 11 and graphically as given in gure 4.
LEARNING BY ANNS
An arti cial neural network has three important char-
acteristics, the architecture, the activation function and
the learning. The weights associated with the intercon-
nection between neurons of the network are initialized
randomly before training of the network. These weights
are adjusted by following the learning algorithm and
when nalized, the network is said to be a stable of the
tted network. A network tted after training can be
applied to a problem (Haykin, 1998). During training,
the weights of the neural network are updated at each
iteration of the training until some stopping condition
is satis ed. Let w(k) is the weight at k
th
iteration of the
training then the new weight at (k+1)
st
is obtained as
given in the equation 14.
(11)
SIGMOID FUNCTION
Since the step functions are not continuous, so they
are not differentiable. There are some machine learning
algorithms which require the continuous and differenti-
able activation functions and hence the step functions
cannot be used in those problems. The sigmoid functions
can be approximated with maintaining their property of
differentiability. There are two types of sigmoid func-
tions used in this type of problem domain, the binary
sigmoid function,and the bipolar sigmoid function. They
both have the continuous outputs.
The binary sigmoid function is also called the logistic
sigmoid function. It can be represented mathematically as
given in equation 12 and graphically as given in gure 5.
(12)
FIGURE 5. Binary Sigmoid Function
where is called the steepness parameter.
The binary sigmoid function has the limitation that it
cannot be applied to bipolar data. In this case, the bipo-
lar sigmoid function is used for continuous output. It
can be represented mathematically as given in equation
13 and graphically as given in gure 6.
FIGURE 6. Bipolar Sigmoid Function
(13)
(14)
where the Δw(k) is the change in weight w at k
th
itera-
tion. Different learning methods give a different method
to obtain the Δw(k).
There are various learning methods used by neural
networks which are categorized mainly into two catego-
ries, the supervised learning and the unsupervised learn-
ing (Jain et al, 1996).
SUPERVISED LEARNING
The supervised learning methods work with the labeled
data. Labeled data means the data where there are input
and output labels given in the data. The training data for
a neural network is referred as the training pattern. Each
training pattern consists of the input patterns and cor-
responding output patterns in case of supervised learn-
ing. The learning algorithms devise a function mapping
between the input and output patterns of the data. Once
the network is trained by following the learning algo-
rithm, it can generate output for an unknown input pat-
tern (Reed et al, 1999). Here we will present a very brief
description of the supervised learning algorithms popu-
larly used in the training of neural networks.
HEBB RULE
It is one of the earliest learning algorithms used by
the arti cial neural networks. According the Hebb rule
or Hebbian learning, the change in weight w
i
can be
obtained as:
(15)
where I
i
is the corresponding input value and the t is
the target value. The Hebb rule has the limitation that it
cannot learn if the target is 0. This is because the change
in weight Δw
i
will become 0 when we put t=0. So it is
Nitesh Malhotra and Aksh Chahal
704 DEEP LEARNING TECHNIQUES AND THEIR APPLICATIONS BIOSCIENCE BIOTECHNOLOGY RESEARCH COMMUNICATIONS
applied when the input and output both are in bipolar
form (Kempter et al, 1999).
PERCEPTRON LEARNING RULE
According to the perceptron learning, if the output of
the neuron is not equal to the target output, then only
the weights associated with the interconnections should
be adjusted otherwise they should not be altered (Ng
et al, 1997). According to this rule, the change in weight
w
i
is obtained as:
network gives the output response indicating the cluster
to which the input vector belongs.The popular unsuper-
vised learning algorithm used for clustering using neural
network is Winner-Takes-All method. It is a competitive
learning rule which chooses the neuron with the greatest
total input as a winner (Kaski et al, 1994).
DEEP LEARNING MODELS
There are various deep learning models developed by the
researchers and they are applied in a different problem
domain. In all the models, the common characteristic is
the multiple layers of learning. Here in this section, we
will present a short survey of popularly used deep learn-
ing models.
DEEP NEURAL NETWORK
Deep neural network is a variant of multilayer feed-
forward arti cial neural network. It has more than one
hidden layers between the input layer and the output
layer (Bengio, 2009). The number of neurons are simi-
lar in each of the hidden layer. Initially, the number of
neurons are xed randomly and it is adjusted manually
during training of the network. Larger the number of
nodes at hidden layer may result in an increase in the
complexity and hence the decrease in the training per-
formance. So, the selection of number of nodes at this
layer is carefully considered. This architecture devises a
compositional model in which the object is referred as
the layered composition of primitives. It has the capa-
bility to model complex non-linear relationships in the
training data. The bene t of using extra hidden layers
in the network enables the composition of features from
lower layers. These features potentially model complex
data with fewer units (Ngiam et al, 2011).
There are two issues also associated with the deep
neural networks. First, the issue of over tting which is
common in many neural network models and second,
the issue of computation time. The problem of over t-
ting has more chances to arise in deep neural network
due to the use of extra layers. Due to this issue, it mod-
els the rare dependencies in the training data. The net-
work gives better result on training data and degraded in
accuracy on validation data. To avoid the issue of over-
tting in deep neural networks, regularization methods
like weight decay or sparsity can be used during train-
ing which excludes the modeling of rare dependencies.
With the increase in smaller training sets can also over-
come the problem of over tting. The computation time
of the learning model depends on many parameters like
such as the layer size, the learning rate, and the ini-
tially chosen weights (Szegedy et al 2013). The number
of nodes in the hidden layers increase the complexity of
the system and it requires more computational time. It
(16)
where is a constant and known as the learning rate.
DELTA RULE
The Delta rule is also known as the Least Mean Square
(LMS) or Widrow-Hoff rule. It is a widely used learning
method used in the training of neural networks. It pro-
duces the output in binary form by reducing the mean
squared error between the activation and the target
value (Auer et al, 2018). According to the Delta rule, the
change in weight Δw
i
is obtained as:
(16)
where the symbols used have their usual meaning.
THE BACKPROPAGATION ALGORITHM
The backpropagation is the most popular learning algo-
rithm used for training the arti cial neural network in
case of supervised learning. In this algorithms, the neu-
ral net repeatedly adjusts the interconnection weights on
the basis of error and deviation from the target output
in response to the training patterns. The error in this
method is calculated at the output layer of the network
and propagated back through the network layers (Adeli
et al, 1994). We will discuss this method in detail in
chapter 6 while discussing the training of Hybrid Deep
Neural Network.
UNSUPERVISED LEARNING
When the training data available for training the neural
network does not has the input-output labels, the learn-
ing performed on this data is called the unsupervised
learning. In this case, the algorithms learns to derive
structure from the data. There are many machine learn-
ing problems like clustering and anomaly detection use
unsupervised learning (Hastie et al, 2008). In cluster-
ing problems, during training of the neural network, the
input vectors which are to be applied to the network are
combined to form clusters. When the network is trained
or stable, on applying a new input vector, the neural
Vaibhav Kumar and M L Garg
BIOSCIENCE BIOTECHNOLOGY RESEARCH COMMUNICATIONS DEEP LEARNING TECHNIQUES AND THEIR APPLICATIONS 705
should be carefully considered while selecting all these
parameters.
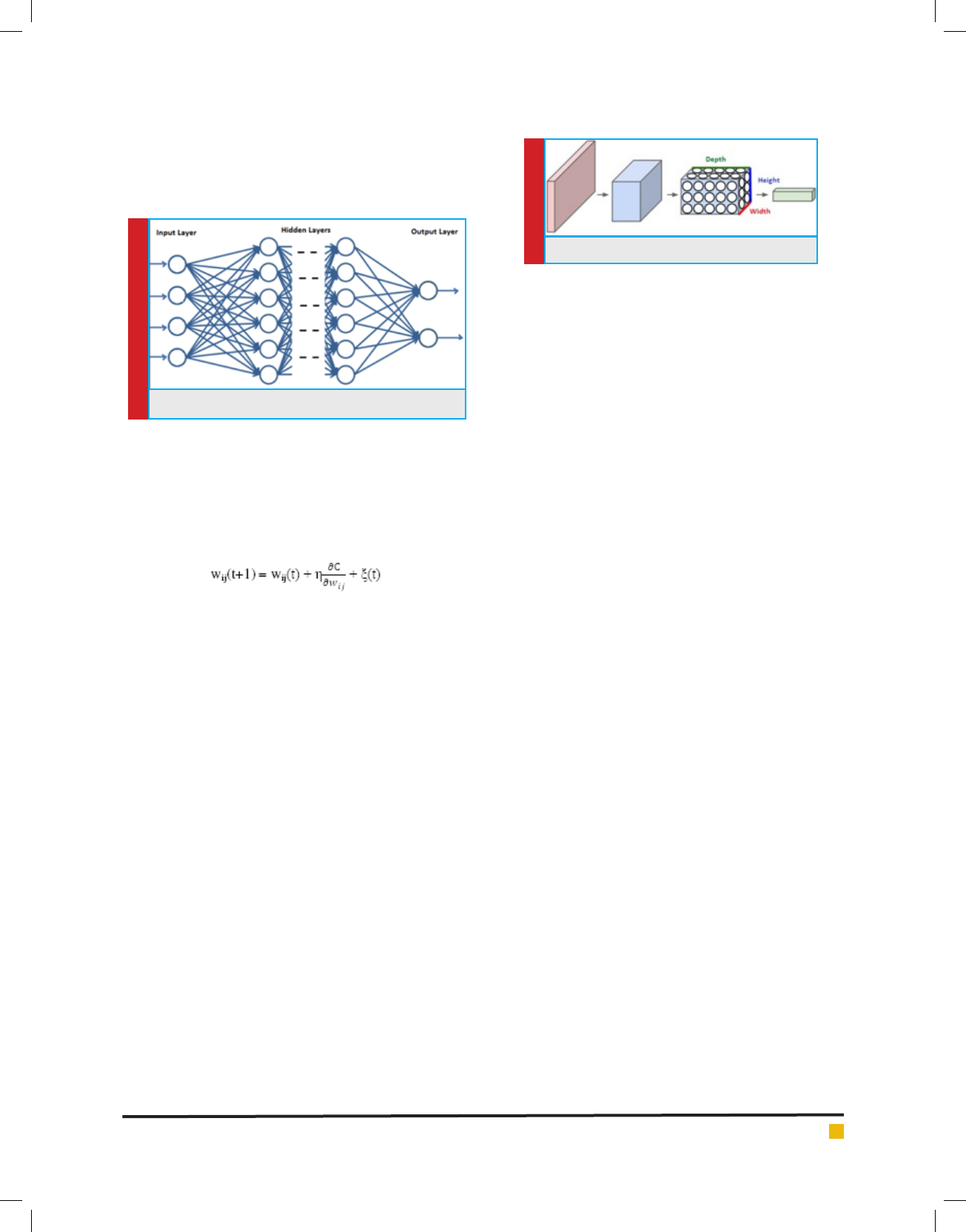
A typical architecture of the deep neural network is
represented in gure 7.
height and the width which are presented in one of the
layers. The 3D input volume is transformed to 3D out-
put volume of neuron activations by every layer of the
network. A typical architecture of convolutional neural
networks consist of the following:-
(i). Convolutional Layer: The convolutional layer of
the network is termed as the core building block which
comprises a set of learnable lters. It is said that these
lters are convolved around the layer. It applies a con-
volution operation to the input which is to be passed to
the next layer as a result of this operation. The network
learns from the lters as they are activated after detect-
ing certain speci c type of features at certain spatial
input position.
(ii). Pooling Layer: Pooling layer helps the convolu-
tional neural network in avoiding the issue of over tting
which is a common issue in arti cial neural networks.
Pooling, which is a form of non-linear down-sampling,
combines the outputs of neurons of one layer into a sin-
gle neuron of next layer. The max-pooling partitions the
input data into a set of non-overlapping slices and pro-
duces the maximum output for each set.
(iii). Local Connectivity: In convolutional neural net-
works, neurons of one layer are connected only to the
neighboring neurons of adjacent layers. When dealing
with the input of high volume, this features avoids the
problem of connectivity and hence reduces the com-
plexity of the network.
(iv). Parameter Sharing: There is a feature of parameter
sharing in convolutional neural networks which helps in
controlling the free parameters. Weight vectors and bias
values are shared among the neurons of the network
which helps in less parameter optimization and faster
convergence during training.
In the eld of natural language processing, convo-
lutional neural networks are applied to text analytics
and sentence classi cation problems (Kalchbrenner et al,
2014). Itis also used in the time-series analysis which
is helpful in predicting stock prices, heights of ocean
tides and weather (LeCun et al, 1998). The architecture
of convolutional neural network has been used in pre-
dicting the DNA sequence binding (Zeng et al, 2016).
These architectures are also used in drug discovery by
FIGURE 7. Deep Neural Network
All the processing in the deep neural network is very
much similar to the multilayer feed-forward arti cial
neural networks. For training of the network, the back-
propagation learning method is used widely to nd the
matching between the actual output and the desired out-
put. The change in weight in this process is calculated
as:
(18)
where is the learning rate, C is the cost function and
is the stochastic term. w
ij
is the weight associated with
the interconnection between i
th
node of one layer and j
th
node of next layer.
The deep neural networks have a wide range of
applications. They are applied in automatic speech rec-
ognition, image recognition, visual art processing, and
natural language processing, drug discovery, customer
relationship management, mobile advertising and many
more elds.
CONVOLUTIONAL NEURAL NETWORK
The convolutional neural network is a variant of a mul-
tilayer perceptron. They are inspired by the biological
process of visualization. This model is a composition of
neurons, learnable weights, and bias values. It consists
of an input layer, an output layer and multiple hidden
layers between the input layer and the output layer.The
hidden layers of the network are the composition of the
convolution layers, pooling layers, fully connected lay-
ers and the normalization layers. They are designed in
such a manner that they require a minimal amount of
preprocessing (Aghdam, 2017, Krizhevsky et al 2012).
The architecture of a convolutional neural network is
represented in gure 8 given below.
The architecture of convolutional neural network
comprises neurons in three dimensions, the depth, the
FIGURE 8. Convolutional Neural Network
Vaibhav Kumar and M L Garg
706 DEEP LEARNING TECHNIQUES AND THEIR APPLICATIONS BIOSCIENCE BIOTECHNOLOGY RESEARCH COMMUNICATIONS
predicting the interactions between biological proteins
and molecules (Strigl et al, 2010).
However convolutional neural networks have been
applied very usefully in many elds and they have given
better results, some limitations are also associated with
this model. It requires a large data set and hence needs a
long training time. There is the issue of performance and
scalability also associated as this architecture is GPU
based (Hinton, 2009).
DEEP BELIEF NETWORKS
A deep belief network is a variant of the deep neural
network. It is a graphical model which is composed of
multiple layers of hidden units. The hidden units are
called the latent variables. There is an interconnection
between layers of the network but there is no connectiv-
ity among units of the network. This graphical model
learns to extract the deep hierarchical representation
of the training data (Hinton et al, 2006). The graphi-
cal model has both directed and undirected edges. The
training of the network is performed in two successive
steps, the unsupervised training and then thesupervised
training. During the unsupervised training, the network
learns to probabilistically reconstruct its inputs when
trained on a set of example. As a result of this training
step, the layers act as feature detectors. After this step,
the supervised training is performed on the network to
perform the task of classi cation (Salakhutdinov et al,
2007).
The deep belief network can be described by separat-
ing its architecture in two parts, the belief network,and
the Restricted Boltzmann Machine. The belief network
is a directed acyclic graphical model comprises the sto-
chastic variables. These variables have states either 0 or
1 where the probability of becoming 1 is obtained by a
bias and weighted inputs from other units. The belief
network solves two types of problems, the inference
problem,and the learning problem. The inference prob-
lem infers the state of the unobserved variables and the
learning problem adjusts the interconnection between
learning variables. This helps the network in generating
the observed data. The Restricted Boltzmann Machines
are the generative models of the arti cial neural net-
work which learns from the probability distribution of a
set of inputs (Larochelle et al, 2008).
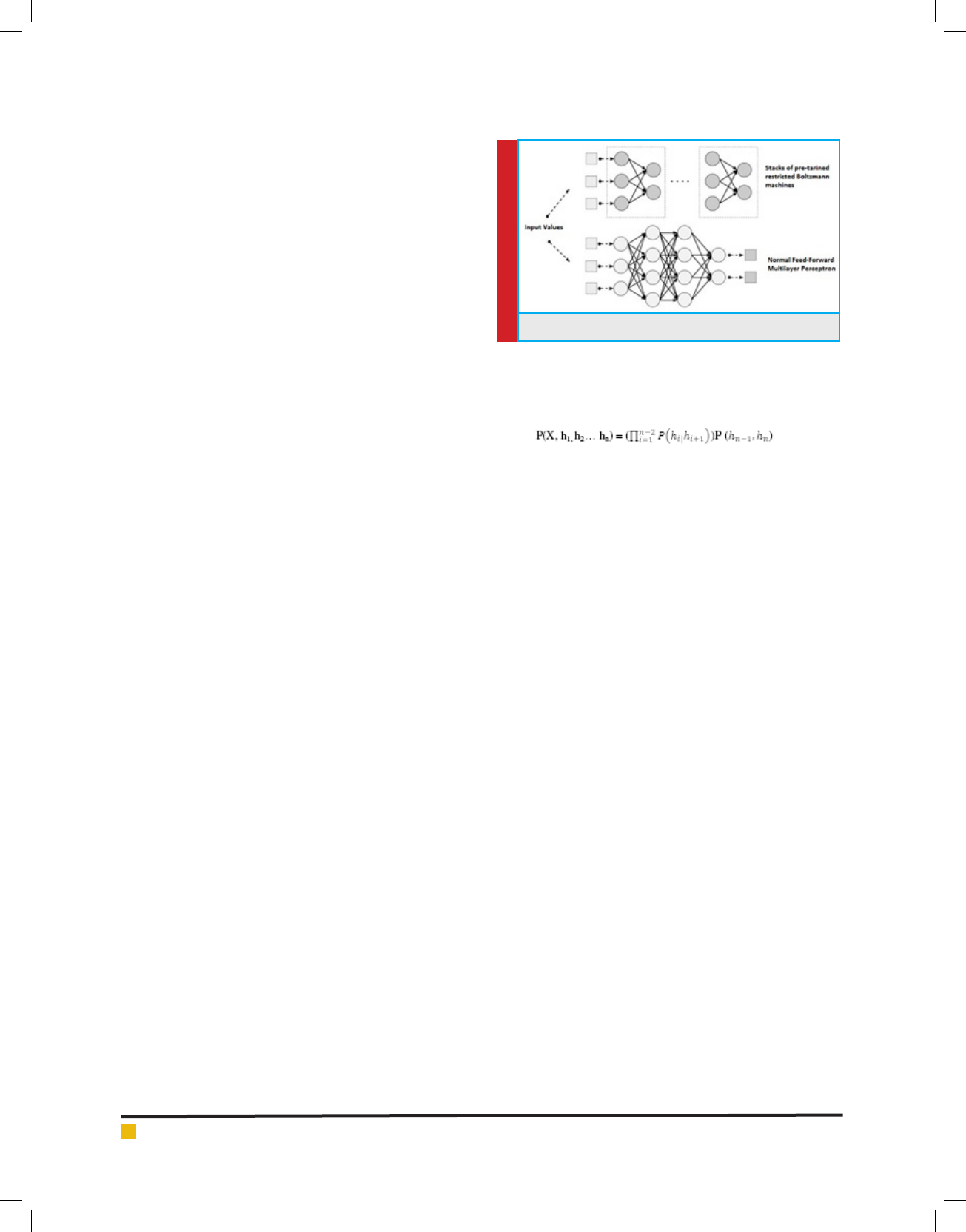
A typical architecture of deep belief network is repre-
sented in gure 9.
The deep belief network is composed of Restricted
Boltzmann Machine (RBM) and a feedforward multilayer
perceptron. The RBM is used at pre-training phase and
the multilayer perceptron is used at the ne tune phase.
The hidden units of the network are the neurons which
cannot be observed directly but they can be inferred
from the other observable variables. In deep belief net-
works, the distribution between observed input vector X
and n
th
hidden layer h
n
is modeled as:
FIGURE 9. Deep Belief Network
(19)
where, X= h
0
, P (h
i-1
,h
i
) is a conditional distribution of
visible units and P (h
n-1
,h
n
) is the joint distribution for
visible units. During the rst step of the training, the
network learns a layer of features from the visible units.
Then, in the next step, it treats the activation of previ-
ously trained feature as visible unit and learns features
in a second hidden layer. After following successive
steps in such manner, the whole network is said to be
trained when the learning for the nal hidden layer is
achieved.
Deep Belief Networks have been used in nancial
business predictions in order to empower the nancial
industries. These networks have also been used in time
series prediction which then leads to nancial market,
signal processing,and weather information prediction.
Draught has also been predicted by this model. It is also
used in predicting the quality of sound vehicle interior
noise (Medsker et al, 2001).
However, Deep Belief Networks have a wide range
of application, some limitations are also associated with
this model. Since deep belief networks are formed with
Boltzmann Machines, they have the limitation that when
the size of the machine is increased, the training time of
the model exponentially increased.
RECURRENT NEURAL NETWORKS
Recurrent neural network belongs to the class of arti -
cial neural network. In these networks, there is a directed
cyclic connection between its internal nodes along a
sequence. It exhibits the dynamic temporal behavior of
a time sequence. These networks use internal memory
states to process in the input sequences (Li et al 2015).
In conventional arti cial neural networks, input values
in an input vector are independent of eachother and
hence processed independently. But there are many tasks
Vaibhav Kumar and M L Garg
BIOSCIENCE BIOTECHNOLOGY RESEARCH COMMUNICATIONS DEEP LEARNING TECHNIQUES AND THEIR APPLICATIONS 707
where the output is dependent on previous calculation
in a sequential process. The recurrent neural networks
are applied to such type of tasks where there is sequen-
tial process on inputs. This network is called recurrent
because it performs the same task for every element in
the sequence. The memory used by the network stores
the information about previous calculations. Practically,
these networks recall calculations of few previous steps
only (Schuster et al, 1997).
The working of the recurrent neural network can be
explained by the architecture represented in gure 10
given below.
There are multiple extensions of the recurrent neural
network. They are discussed brie y as given below.
• Bidirectional Recurrent Neural Networks: This
network is based on the concept that the output
at t timestamp is not only dependent on the previ-
ous elements in the sequence but it also depends
on the future elements. It architecture is such as
two recurrent neural networks are stacked on top
of eachother. Its output is calculated based on the
hidden state of both networks (Irsoy et al, 2014).
• Deep Bidirectional Recurrent Neural Networks:
These networks are similar to the bidirectional
recurrent neural networks with an addition that
they have multiple layers per timestamp. It gives
the bene t of higher learning capacity but it needs
a large size of training data (Hochreiter et al, 1997).
• Long Short-Term Memory (LSTM) Networks:
This variant of the recurrent neural network is
applied to avoid the vanishing gradient problem in
backpropagation learning. In these networks, the
memory units are called as cells which are very
ef cient to capture long-term dependencies. It
takes the previous state s
t-1
and current input x
t
as
input to the cells and these cells decide internally
that which information will be stored and which
information will be erased (Saad et al, 1998).
Recurrent Neural Networks have a large number of
applications in predictive analytics. It has been widely
used in stock market predictions for a long period of
time (Connor et al 1994). Its application in time series
prediction has given the generalization of performance
than other models (Hu et al, 2007). These networks, after
combining dynamic weights, have been used to predict
the reliability of the software (Barbouniset al 2006).
With the addition of spatial correlation features, the
recurrent neural network is used to predict the speed of
wind (Levin, 1990).
Apart from the above important applications, RNNs
have some limitations. There is a slow training time of
these networks. In RNNs, number of hidden neurons must
be xed before training. While processing a vocabulary,
size of context must be small (Sundermeyer et al, 2013).
CONCLUSION AND FUTURE SCOPE
In this paper, we have discussed the various techniques
used in deep learning applications. All these models have
an outstanding record in the area of machine learning.
There is a scope to create new features in these models
so that they can be applied in many domains with bet-
ter performance. The new techniques may be integrated
to exploit the opportunities of the model in prediction.
Parameter tuning can also help to improve the perfor-
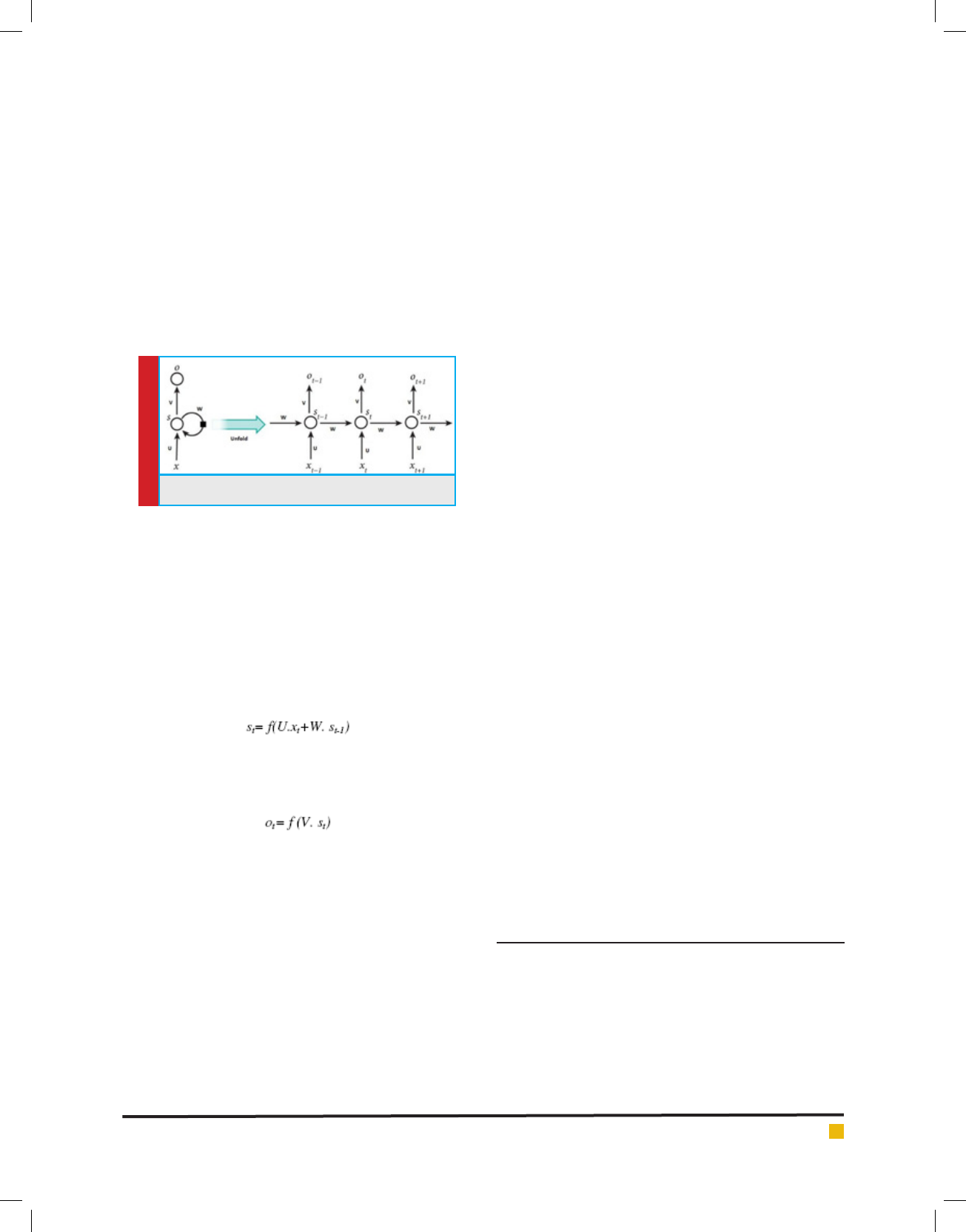
FIGURE 10. Recurrent Neural Network
The above representation shows a recurrent neural
network being unfolded into a full network to process
a sequence of inputs. Here, one layer works for each
input value in the sequence. If folded or combined all
the layers together as a single hidden layer, the weights
and bias remain same because of only one hidden layer
is used in the network. Let x
t
is an input to the network
at timestamp t and s
t
is the hidden state or memory at
timestamp t. This s
t
is calculated on the basis of hid-
den state at previous timestamp and the input at current
timestamp as
(20)
where f is a nonlinear function which may be tanh or
ReLU. s
t-1
is initialized to zero at rst timestamp. o
t
is the
output at t timestamp which is calculated as
(21)
in the above equation 4.21, f is a logistic function
which may be softmax or a normalized exponential
function.
Unlike the other deep neural networks where differ-
ent parameters like weights and bias are used at dif-
ferent hidden layers, in the recurrent neural network
these parameters are shared across all the timestamps.
This helps in reducing the number of parameters during
learning. In some applications, there is input required
at each timestamp and there is an output produced at
each timestamp. But it is not necessary in every applica-
tion of recurrent neural network. This because of the use
of hidden state which captures information about some
sequences.

Vaibhav Kumar and M L Garg
708 DEEP LEARNING TECHNIQUES AND THEIR APPLICATIONS BIOSCIENCE BIOTECHNOLOGY RESEARCH COMMUNICATIONS
mance of these models. Parameter tuning can also help
to improve the performance of these models. So it can
be said that there is a very wide opportunity and open
scope for this model.
REFERENCES
Abraham A (2005) Arti cial Neural Networks. Handbook of
Measuring System Design, Willey Online Library.
Adeli H and Hung S-L (1994) Machine learning: neural net-
works, genetic algorithms, and fuzzy systems. John Willey &
Sons.
Aghdam H H and Heravi E J (2017) Guide to convolutional
neural networks: a practical approach to traf c sign detection
and classi cation. Springer Publication.
Auer P, Burgsteiner H and Maass W (2018) A learning rule
for very simple universal approximators consisting of a single
layer of perceptrons in Neural Networks Vol. 21 Issue 5: Pages
786-795.
Barbounis T G, Theochairs J B, Alexiadis M C and Dokopoulos
P S (2006) Long-term wind speed and power forecasting using
local recurrent neural network models in IEEE Transactions on
Energy Conversion Vol. 21 Issue 1: Pages 273-284.
Bebis G and Georgiopoulos M (1994) Feed-forward neural net-
works in IEEE Potentials Vol. 13 Issue 4: Pages 27-31.
Bengio Y (2009) Learning Deep Architectures for AI in Foun-
dations and Trends in Machine Learning Vol. 2 Issue 1: Pages
1-127.
Buscema M (1998) Back Propagation Neural Networks in Sub-
stance Use & Misuse Vol. 33 Issue 2: Pages 233-270.
Chen X-W and Lin X (2014) Big Data Deep Learning: Chal-
lenges and Perspectives in IEEE Access Vol. 2.
Connor J T, Martin R D and Atlas L E (1994) Recurrent neural
networks and robust time series prediction in IEEE Transac-
tions on Neural Networks Vol. 5, Issue 2: Pages 240-254.
Deng L and Yu D (2014) Deep Learning: Methods and Applica-
tions in Fundamentals and Trends in Signal Processing, Vol. 7
Issue 3: Pages 197-387.
Garven M V and Bohte S (Accessed 2018) Arti cial Neural Net-
works as Models of Neural Information Processing. Frontiers
Research Topics, Online.
Goodfellow I, Bengio Y andCourville A (2016) Deep Learning.
MIT Press, Online.
Hastie T, Tibshirani R and Friedman J (2008) Unsupervised
Learning. The Elements of Statistical Learning Springer Series
in Statistics: Page 485-585.
Haykin S (1998) Neural Networks: A Comprehensive Founda-
tion. Prentice-Hall, 2
nd
Edition.
Hinton G (2009) Deep Belief Networks in Scholarpedia, Vol.
4, Issue 5.
Hochreiter S and Schmidhuber J (1997) Long Short-Term
Memory in Neural Computation Vol. 9 Issue 8: Pages- 1735-
1780.
Hinton G E, Osindero S and Teh Y W (2006) A Fast Learning
Algorithm for Deep Belief Nets in Neural Computation Vol. 18
Issue 7: Pages 1527-1554.
Hoff R D (Accessed 2018) Deep Learning: A Breakthrough
Technology. MIT Technology Review, Online.
Hop eld J J (1988) Arti cial neural networks in IEEE Circuits
and Device Magazine Vol. 4 Issue 5: Pages 3-10.
Hu Q P, Xie M, Ng S H and Levitin G (2007) Robust recur-
rent neural network modelling for software fault detection and
correction prediction in Reliability Engineering and System
Safety Vol. 92 Issue 3: Pages 332-340.
Irsoy O and Cardie C (2014) Opinion Mining with Deep Recur-
rent Neural Networks in Proceedings of the 2014 Confer-
ence on Empirical Methods in Natural Language Processing
(EMNLP): Pages 720–728.
Jain A K, Mao J and Mohiuddin K K (1996) Arti cial neural
networks: a tutorial in Computer Vol. 29 Issue 3: Pages 31-44.
Kalchbrenner N, Grefenstette E andBlunsom P (2014) A Convo-
lutional Neural Network for Modelling Sentences in Proceed-
ings of the 52
nd
Annual Meeting of the Association of Com-
putational Linguistics, Baltimore, Maryland: Pages 655-665.
Kaski S and Kohonen T (1994) Winner-take-all networks for
physiological models of competitive learning in Neural Net-
works Vol. 7 Issue 6: Pages 973-984.
Kempter R, Gerstner W and Hemmen J L (1999) Hebbian learn-
ing and spiking neurons in Physical Review E Vol. 59 Issue 4:
Pages 4498-4514.
Krizhevsky A, Sutskever I and Hinton G E (2012) ImageNet
Classi cation with Deep Convolutional Neural Networks in
Proceedings of Advances in Neural Information Processing
Systems 25.
Larochelle H and Bengio Y (2008) Classi cation using dis-
criminative restricted Boltzmann machines in Proceeding of
25
th
International Conference on Machine Learning, Finland:
Pages 536-543.
LeCun Y and Bengio Y (1998) Convolutional networks for
images, speech, and time series in The handbook of brain the-
ory and networks: Pages 255-258.
Levin E (1990) A recurrent neural network: Limitations and
training in Neural Networks Vol. 3 Issue 6: Pages 641-650.
Li X and Wu X (2015) Constructing long short-term memory
based deep recurrent neural networks for large vocabulary
speech recognition in Proceedings of the IEEE International
Conference on Acoustics, Speech and Signal Processing, QLD,
Australia.
Medsker L R and Jain L C (2001) Recurrent Neural Networks:
Design and Applications. CRC Press LLC.
Najafabadi M M, Villanustre F, Khoshgoftar T M, Seliya N,
Wald R and E Muharemagic (2015) Deep learning applications
and challenges in big data analytics in Journal of Big Data Vol.
2 Issue 1: Pages 1-21.
Ng H T, Goh W B and Low K L (1997) Feature selection, per-
ceptron learning, and a usability case study for text categori-

Vaibhav Kumar and M L Garg
BIOSCIENCE BIOTECHNOLOGY RESEARCH COMMUNICATIONS DEEP LEARNING TECHNIQUES AND THEIR APPLICATIONS 709
zation in Proceedings of the 20th annual international ACM
SIGIR conference on Research and development in informa-
tion retrieval, Philadelphia, Pennsylvania, USA: Pages 67-
73.
Ngiam J, Khosla A, Kim M, Nam J, Lee H and Ng A (2011)
Multimodal Deep Learning in Proceedings of 28
th
International
Conference on Machine Learning, WA, USA.
Nisbet R, Miner G and Yale K (2018) Chapter-19, Deep Learn-
ing. Handbook of Statistical Analysis and Data Mining Appli-
cations, 2
nd
Edition, Academic Press.
Reed R and Marks R J (1999) Neural Smithing: Supervised
Learning in Feedforward Arti cial Neural Networks. A Brad-
ford Book, MIT Press.
Roy S and Chakraborty U (2013) Introduction to Soft Comput-
ing: Neuro-Fuzzy and Genetic Algorithms. Pearson Education
India, 1
st
Edition.
Saad E W, Prokhorov D V and Wunsch D C (1998) Comparative
study of stock trend prediction using time delay, recurrent and
probabilistic neural networks in IEEE Transactions on Neural
Networks Vol. 9 Issue 6: Pages 1456-1470.
Salakhutdinov R, Mnih A and Hinton G (2007) Restricted
Boltzmann machines for collaborative ltering in Proceeding
of 24
th
International Conference on Machine Learning, Oregon,
USA: Pages 791-798.
Schuster M and Paliwal K K (1997) Bidirectional recurrent neu-
ral networks in IEEE Transactions on Signal Processing, Vol.
45 Issue 11: Pages 2673-2681.
Strigl D, Ko er K and Podlipnig S (2010) Performance and
Scalability of GPU-based Convolutional Neural Networks in
Proceedings 18
th
Euromicro International Conference on Paral-
lel, Distributed and Network-Based Processing, Pisa, Italy.
Sundermeyer M, Oparin I, Gauvain J-L, Freiberg B, Schluter
R and Ney H (2013) Comparison of feedforward and recurrent
neural network language models in Proceedings of the IEEE
International Conference on Acoustics, Speech and Signal Pro-
cessing, BC, Canada.
Szegedy C, Toshev A and Erhan D (2013) Deep Neural Net-
works for Object Detection in Proceedings of the Advances in
Neural Information Processing Systems 26.
Yegnarayana B. Arti cial Neural Networks. Prentice-Hall of
India, Latest Edition.
Zeng H, Edwards M D, Liu G and Gifford D K (2016) Convolu-
tional neural network architectures for predicting DNA-protein
binding in Bioinformatics Vol. 32 Issue 12: Pages 121-127.