
Neurological
Communication
Biosci. Biotech. Res. Comm. 11(3): 363-369 (2018)
Formation of the control signals based on application
of the neural network approaches in spine
rehabilitation systems
Nikolay V. Dorofeev*
1
, Anastasia V. Grecheneva
2
and Oleg R. Kuzichkin
2
1
Vladimir State University named after A. G. and N. G. Stoletovs, 87 Gorkiy St., 600000, Vladimir, Russia
2
Belgorod National Research University, 85 Pobedy St., 308015 Belgorod, Russia
ABSTRACT
The article substantiates the necessity of correction of control signals depending on the state of the spine and the
movements performed. The generalized structural scheme of the control unit of executive mechanisms in spine
rehabilitation systems is considered. As a result of the operation of the control unit, motor exercises are corrected in
rehabilitation techniques based on the results of modeling the permissible degree of exure of the spine. An example
of patterns of motor actions is given and a generalized model of motion patterns is described.
KEY WORDS: DIAGNOSTIC, REHABILITATION, NERVOUS SYSTEM, GONIOMETRY, MUSCULOSKELETAL SYSTEM, NEURAL NETWORK
363
ARTICLE INFORMATION:
*Corresponding Author: russia@prescopus.com
Received 12
th
July, 2018
Accepted after revision 23
rd
Sep, 2018
BBRC Print ISSN: 0974-6455
Online ISSN: 2321-4007 CODEN: USA BBRCBA
Thomson Reuters ISI ESC / Clarivate Analytics USA and
Crossref Indexed Journal
NAAS Journal Score 2018: 4.31 SJIF 2017: 4.196
© A Society of Science and Nature Publication, Bhopal India
2018. All rights reserved.
Online Contents Available at: http//www.bbrc.in/
DOI: 10.21786/bbrc/11.3/3
INTRODUCTION
The ef ciency of modern technical means makes it pos-
sible to implement algorithms for real- time processing
large amounts information. It is lead to increase the
ef ciency and quality of medical systems, in particu-
lar, rehabilitation systems of the spine. The complexity
of developing of this class systems is associated with a
greater risk of harm to the health of the patient due to
an incorrect diagnosis. This risk also includes erroneous
decisions of the rehabilitation system that are incompat-
ible with the life of the patient. The need for adaptation
to the various physiological parameters of the patient
taking into account of injuries to the spine causes
even greater dif culties,
(Sobolev et al., 2017 Kulik,
2017).
The aim of the present work is to improve the qual-
ity of management of rehabilitation exoskeletons due to
the use of neural network algorithms for estimating the
permissible degree of exure of the yesterday.

364 FORMATION OF THE CONTROL SIGNALS BASED ON APPLICATION OF THE NEURAL NETWORK APPROACHES BIOSCIENCE BIOTECHNOLOGY RESEARCH COMMUNICATIONS
Nikolay V. Dorofeev etal.
THE PROBLEM OF MANAGEMENT OF THE
REHABILITATION SYSTEMS
Currently, the functionality of existing rehabilitation
systems is insuf cient for patients with spine patholo-
gies. This is due, rst of all, to their limited application
in conditions of low mobility of the patient (fractures,
gunshot wounds, etc.) or the lack of a priori informa-
tion on the patient’s permissible movements (during
rehabilitation) without causing additional harm to his
health. However, the process of rehabilitation is acceler-
ated if the correct load on the pathological parts of the
spine is calculated (Yezhov et al., 2013; Tuktamyshev
& Bezmaternykh, 2014; Vengerova & Solovyova, 2008;
Zubareva, 2011, Maksimova, 2012; Kulik, 2017, Sobolev
etal., 2017).
The control signals for the rehabilitation exoskeleton
are formed on the basis of the patient’s desired move-
ments and are limited by the physiological parameters
and state of the patient.
Arbitrary movements of the patient are formed by
the exoskeleton on the basis of the recorded nerve
(electroencephalography), muscle (electromyography).
Involuntary movements of the patient are formed by the
mechanical (strain gage) signals of the exoskeleton at
different stages of motor processes in various (informa-
tive) areas of the patient’s body, (Grecheneva et al.,
2017).
Problems in recording arbitrary movements of the
patient are the error of the measuring path, the quality
of recognition of informative signals and pathology of
the human neuromuscular system.
So, for example, all movements of the musculoskel-
etal system of a human without pathologies begin in
the central nervous system, namely in the motor zone
of the cerebral cortex. The generated electrical signals
of movement (motion impulses) from the brain through
the spinal cord are transmitted to the peripheral nerv-
ous system along those nerve bers (motor neurons) that
must cause the necessary contractions of the muscular
system, (Sobolev etal., 2017).
Motor neurons have feedbacks, which receive infor-
mation from muscle bers, receptors and other sensory
receptors, in order to further coordinate movement and
prevent muscle damage. Since the moment of formation
of an impulse in the cerebral cortex before the move-
ment (contraction or relaxation of the muscles), some
time passes, individual intervals of which are described
in (Sinitskaya & Gribanov, 2014; Zakharova etal., 2012;
Grecheneva etal., 2017).
In general, the movement (especially arbitrary) is the
result of complex neuropsychophysiological processes in
which a plan of motion or reaction to stimuli is formed,
and its constant correction occurs throughout the entire
movement. In addition to the motor zone of the cerebral
cortex, other areas of the brain are involved: the poste-
rior parietal cortex, the limbic system, the cerebellum,
the frontal cortex, etc. (
Sinitskaya & Gribanov, 2014).
When processing and analyzing the signals of motor
neuron activity, attention should be paid to the fact that
useful signals, although cyclic, are not stationary. In
addition, the distribution of the noise component of the
signals is not normal (Zakharova etal., 2012).
Functional changes of any part of the path from the
place of formation of motor signals to the muscle cause
changes in the parameters of motion of the involved
kinematic pairs and the musculoskeletal system as a
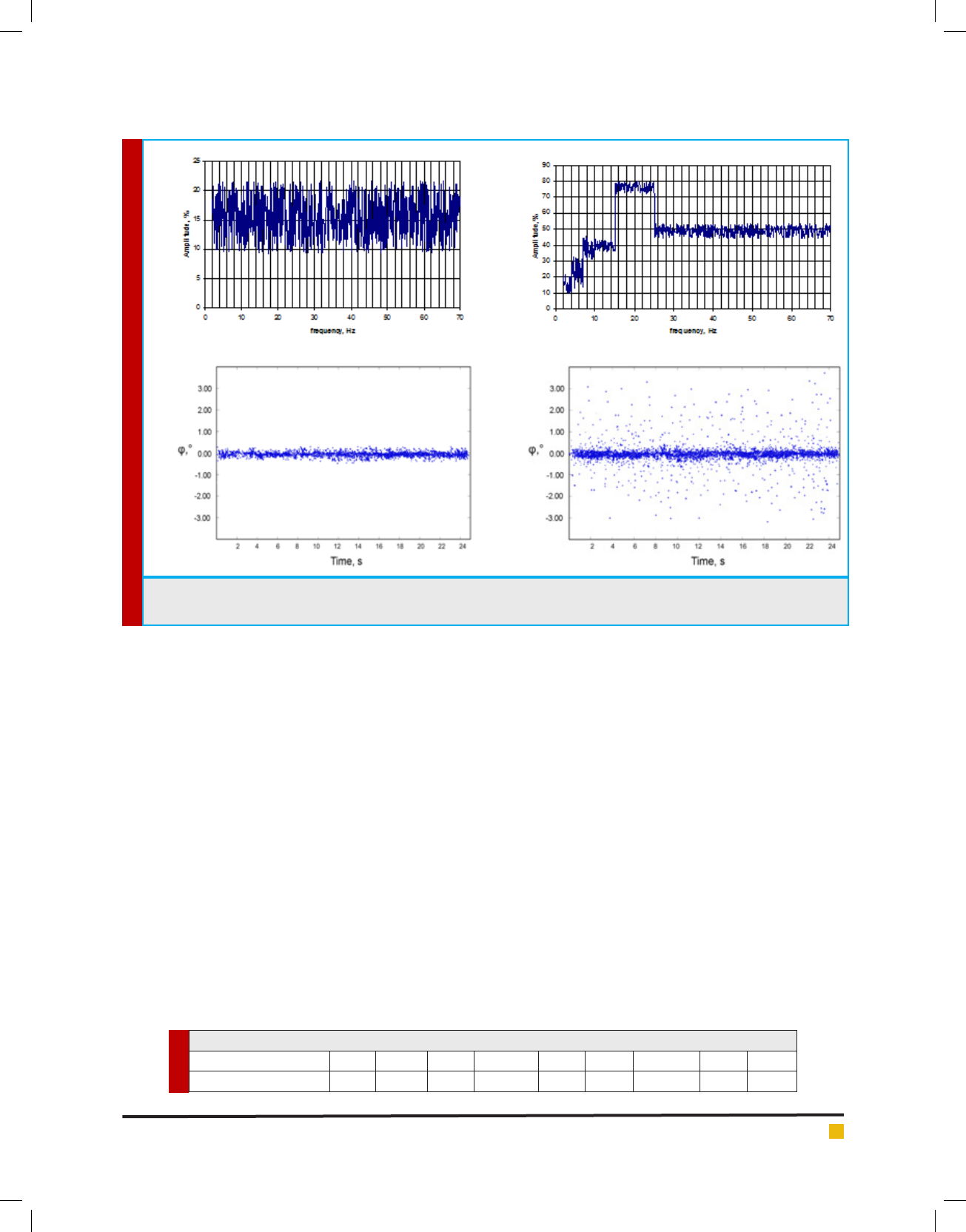
whole. Figure 1 shows the averaged electromyograms
obtained (Fig. 2a and 2b) and the dynamics of the devia-
tion angle from the axis of the spine (Fig. 2c and 2d) in
the state of rest of a healthy person (Fig. 2a and 2c) and
a person with a tremor of the back muscles (Fig. 2b and
2d) (Butukhanov, 2009).
Deviations in the electrophysiological signals
involved in the locomotion activity of the musculo-
skeletal system, from normal values for healthy people
manifest themselves in amplitude, phase, shape, and
other characteristics of the signals and depend on the
different concentration of the attention, the accuracy
etc. (Voznesenskaya, 2006; Doronin & Doronina, 2010;
Rakhmilevich et al., 2012; E mov, 2012, Zakharova &
Shemirova, 2016; Shchenyavskaya & Zakharova, 2015;
Zakharova etal., 2016).
The need for high accuracy of recording of the patient
movements is due to possible damage to nerve bers
and the nervous system as a whole. When a nerve tis-
sue is damaged, a number of processes occur succes-
sively, leading to the death of damaged nerve cells and
the subsequent death of intact ones. According to mod-
ern ideas, the main factors leading to the destruction of
nerve cells are a violation of microcirculation, hypoxia
and ischemia. There is a link between the degree of neu-
ronal damage and the change in the level of the constant
potential and the membrane potential of neurons (Su -
anova and Shapkin 2014; Shanitsin etal., 2013).
Damage to the nervous tissues of the spinal cord
changes the frequency and amplitude of the spinal cord
signals and depends on the amount of pressure (com-
pression) and the degree of damage to the nerve ber.
Relying on the works on a dependence of the amplitude
of the electrospinogram on the subdural pressure can be
described in accordance with Table 1.
Thus, damage to the spinal cord causes an increase
in spontaneous electrical activity, and in case of signi -
cant damage, further decrease in spontaneous electrical
activity. In this case, the frequency characteristics of the
activity of the spinal cord correspond to the frequency
characteristics of activity of the cerebral cortex, but with
BIOSCIENCE BIOTECHNOLOGY RESEARCH COMMUNICATIONS FORMATION OF THE CONTROL SIGNALS BASED ON APPLICATION OF THE NEURAL NETWORK APPROACHES 365
Nikolay V. Dorofeev etal.
FIGURE 1. Recording of the averaged electromyogram (a, b) and the dynamics of the deviation angle from the axis of the
spine in the state of rest of a healthy person (c) and a patient with a tremor of back muscles (d)
(c)
(a)
(b)
(d)
Table 1. Dependence of the amplitude of the electrospinogram from subdural pressure
Pressure, mm. gt; 183 250 300 350 400 450 500 550 560
Amplitude, μV 31±9 40±10 52±12 54,5±15,5 64±18 78±20 82,5±15,5 73±15 68±15
smaller amplitude (in the spinal cord). A rupture of the
spinal cord increases the level of the constant potential
and lowers the values on the electro-spinogram of seg-
ments lying below the trauma, and leads to an increase
in electrophysiological changes as the distance decreases
from damage.
Segments lying above the damage zone are charac-
terized by a decrease in the level of the constant poten-
tial and the total amplitude on the electrospinograms, a
decrease in the magnitude of electrophysiological devia-
tions. With pressure on the spinal cord, the level of the
constant potential shifts and the amplitude decreases
on the electrospinograms. The degree of violations in
signals decreases is removed from the site of pressure.
When the pressure on the spinal cord decreases, repolar-
ization occurs and the amplitude increases again on the
electrospinograms. A complete restoration of the level
of constant potential does not occur. Thus, the complex
processing of the values of the level of the constant
potential and electric activity of the spinal cord makes it
possible to evaluate the electrophysiological violations
and functional changes in the spinal cord both in the
injury zone and in neighboring areas (Kulik, 2017).
Thus, the formation of control signals for the rehabil-
itation exoskeleton is determined not only by the chosen
recovery technique, but also by the patient’s vertebral
state (vertebral, interarticulate uid, interarticulate car-
tilage and neural ber regions).
CONTROL UNIT FOR REHABILITATION
EXOSKELETON
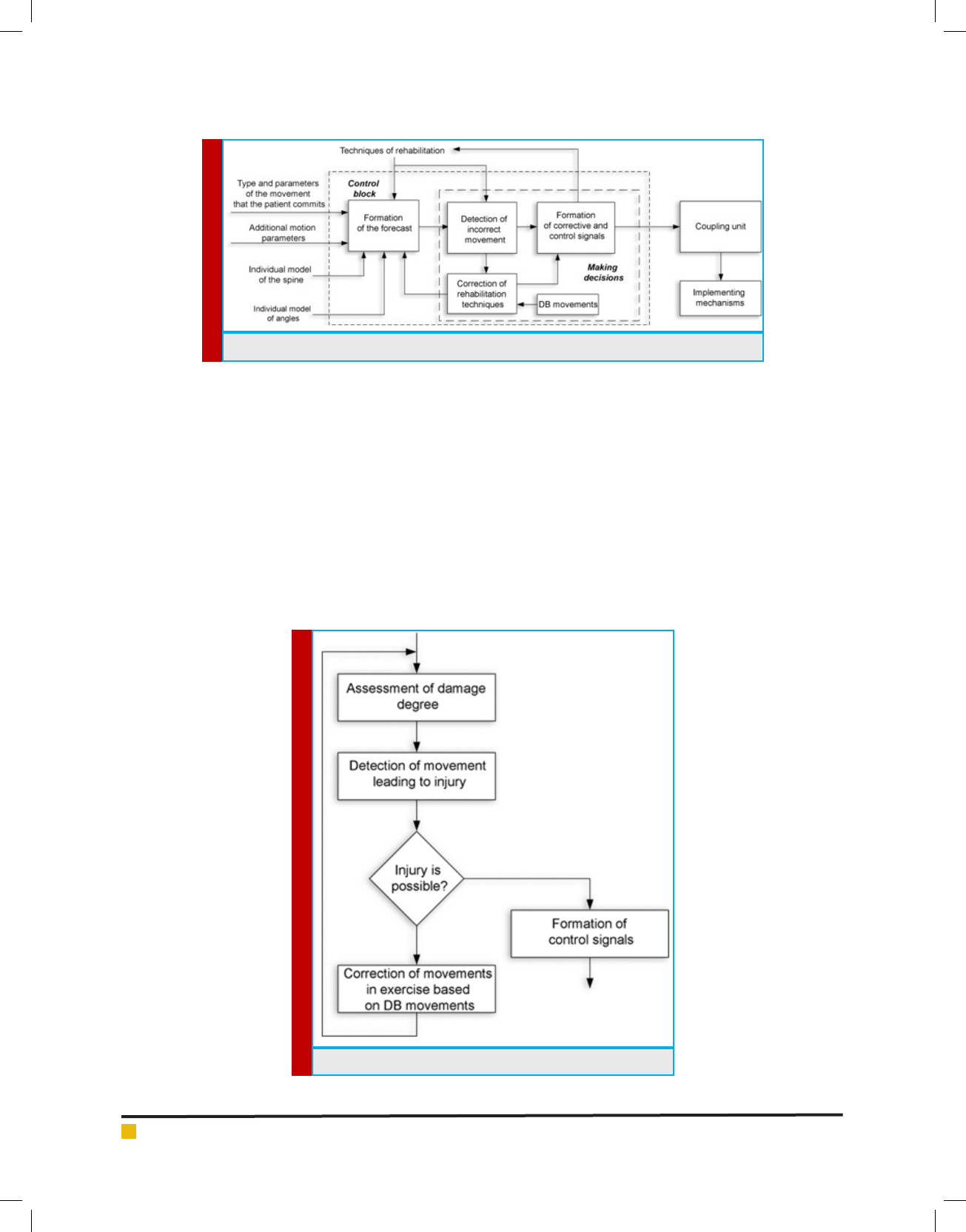
The task of the control unit for the rehabilitation exo-
skeleton is to generate control signals for the actuators
(Figure 2).
The control unit consists of two functional parts: a
forecast generation unit and a decision block. The fore-
casting unit evaluates the location, extent and likelihood
of damage to the bony, cartilaginous and nerve tissues
of the spine. The prognostic estimation is formed on the
Nikolay V. Dorofeev etal.
366 FORMATION OF THE CONTROL SIGNALS BASED ON APPLICATION OF THE NEURAL NETWORK APPROACHES BIOSCIENCE BIOTECHNOLOGY RESEARCH COMMUNICATIONS
basis of the information angular model of the patient,
characterizing the permissible deviations in patient move-
ments, the individual spine model describing the geomet-
ric and spatial parameters of the main parts of the spine,
the data on the movement (type, speed, angles and EMG
and EEG data). The performed movements are performed
in accordance with the rehabilitation technique. The algo-
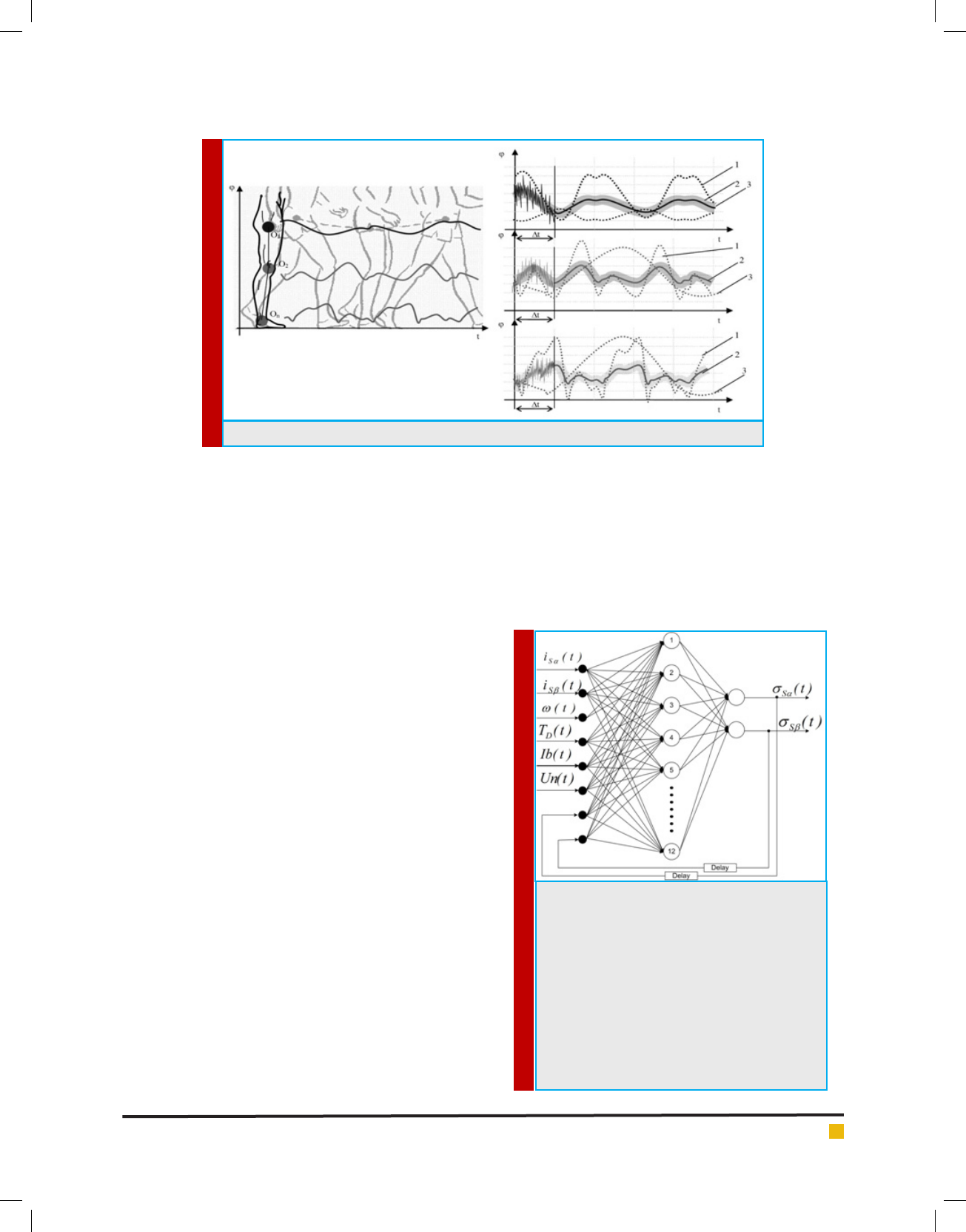
rithm of the control unit is shown in Figure 3.
A lot of work has been devoted to the main dependen-
cies of the behavior of the musculoskeletal system, joints
and their connecting components, pain sensations and
thresholds of perception of pain, for example (Pezhovic
et al., 2003; Pinchuk et al., 2008; Shilko & Ermakov,
2008; Suslov etal., 2008; Babchina etal., 2017; Grech-
eneva etal., 2016; Grecheneva etal., 2017). Formation of
prognostic estimates of damage to the spinal sections dur-
ing motion on the basis of individual models and param-
eters of movements are given in (Dorofeev etal., 2017).
The vector of predictive estimates for each type of
tissue is described by the vector F={L(X,Y,Z), P(X,Y,Z)},
where L is the three-dimensional vector for estimating
the degree of damage, and P is the damage probability.
The change in the projection vector in time F(t) is used
in conjunction with the vector M(t), describing the reha-
bilitation technique (rehabilitation exercise). The vector
M(t)={K(t), C(t)} characterizes the space-time change in
FIGURE 2. The control unit for rehabilitation exoskeleton
FIGURE 3. The algorithm of the control unit
Nikolay V. Dorofeev etal.
BIOSCIENCE BIOTECHNOLOGY RESEARCH COMMUNICATIONS FORMATION OF THE CONTROL SIGNALS BASED ON APPLICATION OF THE NEURAL NETWORK APPROACHES 367
FIGURE 4. Sample Motion Action Templates
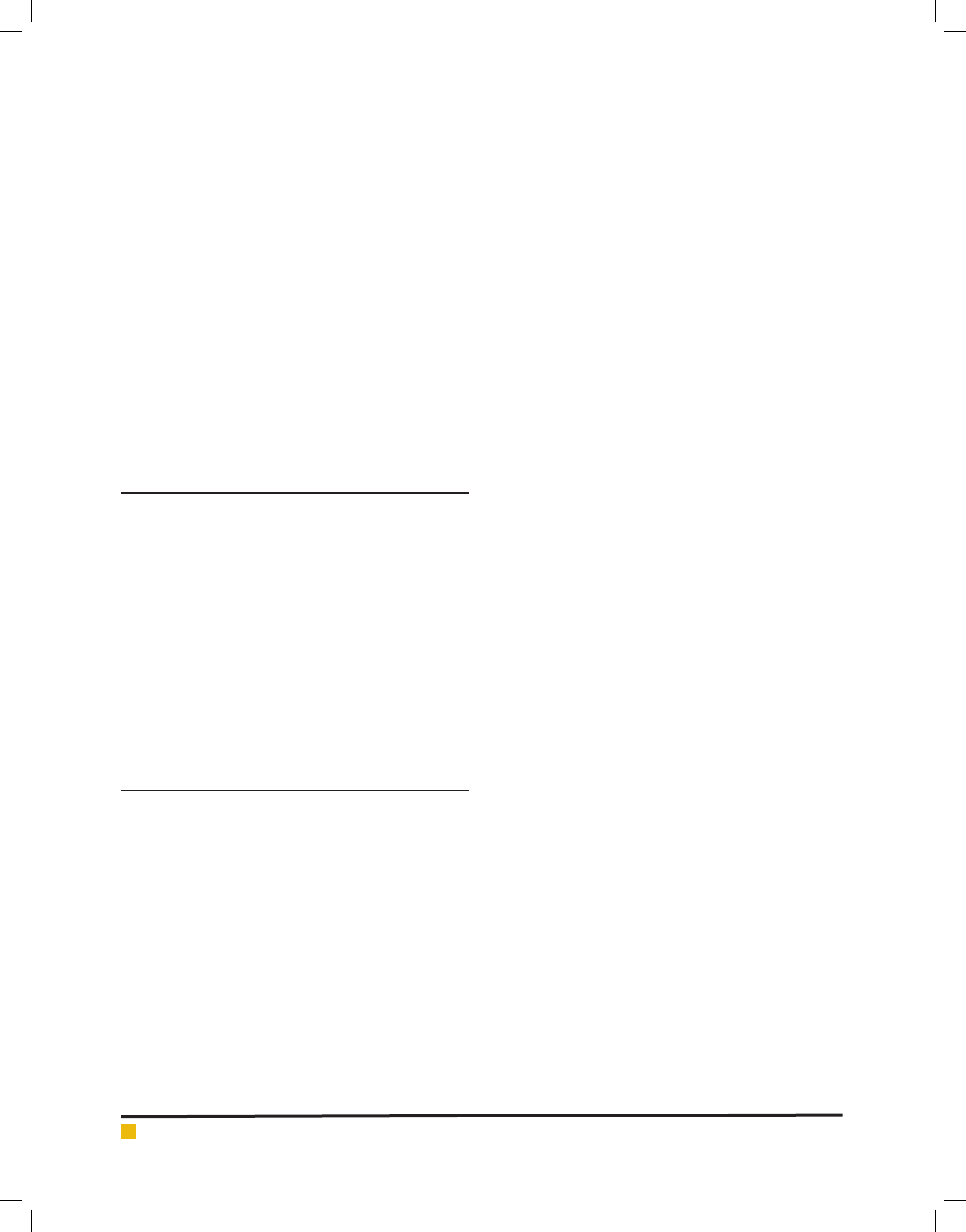
FIGURE 5. The structure of the neural network.
Input signals of such a network are stator current
signals i
S
i
S
of the i-node of the exoskeleton,
the rotor frequency,
T
D
(t) is the vector of spatial
change in the position of the kinematic pairs;
Ib
(t),
Un(t) are the vectors describing the change
in electrophysiological parameters during the
time of motion and feedback c from the neural
network output delayed by one step of training
(Delay block), and output signals - signals that
determine the mode of operation of the exoskel-
eton nodes
S
S
.
the position of the kinematic pairs of the spine K(t) and
the space-time characteristics of the motion (tempo, fre-
quency, etc.) C(t).
Classi cation of movements occurs on the basis of
pre-formed patterns of motor actions (Figure 4). The
motion pattern can be described by the vector
(3)
where
T
D
(t)
is the vector of spatial change in the posi-
tion of the kinematic pairs;
Ib(t), Un(t)
are the vectors
describing the change in electrophysiological parame-
ters during the time of motion (some examples are pre-
sented in [16]);
Pst
is the vector describing the spec-
tral-temporal characteristics (frequency, power spectra,
etc.) of patterns of goniometric and electrophysiologi-
cal signals;
Ppt
is the vector describing the space-time
characteristics of the motion (tempo, amplitude, speed,
acceleration, etc.).
Motion patterns are stored in a database, sup-
plemented for individual characteristics and various
pathologies. Database updates are necessary for auto-
matic learning and retraining of the neural network.
When implementing the system of direct control of
the exoskeleton, it is necessary to have information
about the magnitude and position of the goniometric
vectors and vectors of the stator and exoskeleton rotor
linkage, which are measured by means of various sen-
sors. Unlike vector systems, the direct torque control
system uses only current and voltage sensors and does
not require the use of a speed sensor. However, accu-
rate estimation of the position of the ux-linkage vector
of each of the exoskeleton servo drives is problematic,
therefore, state observers are often used to determine
the ux linkage. In the case of a medical rehabilitation
exoskeleton, the patient’s angular model is an observer
of the state, the input of which is measured goniometric
data, the components of the servo vector of the state,
and an output of the general state vector is output. As
an observer, it is proposed to use an arti cial neural
network (Fig. 5).
It is assumed that combining the method of direct
torque control and neural network technologies will sig-
T(t) = {T
D
(t), Ib(t), Un(t), Pst,Ppt}
Nikolay V. Dorofeev etal.
368 FORMATION OF THE CONTROL SIGNALS BASED ON APPLICATION OF THE NEURAL NETWORK APPROACHES BIOSCIENCE BIOTECHNOLOGY RESEARCH COMMUNICATIONS
ni cantly improve the quality of control of an asyn-
chronous traction electric drive, as well as the robust-
ness of the control system (resistance to changes in the
parameters of the control object), thereby improving the
quality of control and identi cation.
Simulation of the operation of the control unit was
performed on the CT of patient data, which has a curva-
ture of the cervical spine. When the head was tilted to
an angle of more than 59 degrees on average, the patient
experienced pain. In 87% of cases, the head inclinations
were accompanied by a slight crunch in the cervical
region.
Initial exercises for modeling the operation of the
control unit included the inclination of the head by 90
degrees. As a result of the operation of the control unit,
the initial exercises were adjusted, the maximum incli-
nation of the head was 64 degrees (Figure 6).
CONCLUSION
Thus, the developed algorithms of the control unit allow
to correct motor exercises in the rehabilitation technique
for the physiological characteristics of the patient, and
also do not allow the executive mechanisms to make
movements dangerous to health. It should be noted that
the permissible limits for the search for optimal exercises
of the control unit are set by the expert and for auto-
mated work should be automatically determined from
the CT data and the simulation results. These bounda-
ries in the example under consideration were set rigidly,
which was the reason for the discrepancy between the
results of modeling and pain sensations of the patient
being studied.
ACKNOWLEDGEMENTS
The work was supported by RFBR grant No. 16-08-
00992_a
REFERENCES
Babchina PI, Petrova EM, Chesnokov IV. (2017). Three-dimen-
sional modeling in the development of a biomechanical method
for determining the permissible loads on the deformed segment
of the thoracic spine. Innovative materials and technologies in
design. P. 37-4526
Butukhanov VV. (2009). The state of the muscular system in
patients with scoliotic deformation of i-ii degree in ontogen-
esis. Communication II. Tremor of muscle tension in the back
muscles of sciosis patients of I-II degree in different age peri-
ods. Acta Biomedica Scienti ca. No. 3.
Dorofeev N, Grecheneva A, Kuzichkin O, Romanov R. (2017).
The method of the estimation of the acceptable degree of the
de ection of the spine and of bias of vertebrae in systems of
the diagnostic and the rehabilitation. International Multidis-
ciplinary Scienti c GeoConference Surveying Geology and
Mining Ecology Management, SGEM, Volume 17, Issue 61, Pp.
1161-1168.
Doronin BM, Doronina OB. (2010). Some topical issues of diag-
nosis and treatment of pain in the back. Neurology, neuropsy-
chiatry, psychosomatics. No. 4. P. 24-28
E mov AP. (2012). Clinically signi cant parameters of gait.
Traumatology and orthopedics of Russia. No. 1 (63). C, 60-65
Grecheneva A, Konstantinov I, Kuzichkin O, Dorofeev N.
(2017). Decision support system for real-Time diagnosis of
musculoskeletal system. CEUR Workshop Proceedings. Volume
1839, Pp. 84-97
Grecheneva A, Konstantinov I, Kuzichkin O. (2016). The struc-
ture of the information system to support the goniometric
accelerometric control of human biomechanics. Nano, bio and
green - technologies for a sustainable future conference pro-
ceedings, sgem 2016, vol 1 International Multidisciplinary Sci-
enti c geoconference-SGEM. pp. 829-836
Grecheneva A, Kuzichkin O, Dorofeev N. (2017). The algorithm
for express-analysis of the human functional systems. Inter-
national Multidisciplinary Scienti c GeoConference Surveying
Geology and Mining Ecology Management, Vol 17, Issue 61.
1081-1088
Kulik AA. (2017). Mathematical modeling of the movement of
the bioelectric hip prosthesis. Bulletin of the Astrakhan State
Technical University. Series: Management, Computer Science
and Informatics. No. 2. P. 7-13
Maksimova YuA. (2012). Prevention of functional disorders
of the spine by eliminating postnagruzochnyh changes in the
musculoskeletal apparatus of upper acrobats. Pedagogy, psy-
chology and medico-biological problems of physical education
and sport. 12. P. 75-79
Pezhovic S, Chotek S, Filipyak J, Begzhinsky R,Yarmundovich
V, Charek I. (2003). The effect of stabilization on the changes
in stiffness characteristics of the cervical spine (experimental
study). Russian Journal of Biomechanics. T. 7. No. 3. P. 52-60
Pinchuk LS, Chernyakova YuM, Goldede VA. (2008). Tribology
of joints and problems of modern orthopedics. Friction and
wear. T. 29. No. 3. P. 293-305
Rakhmilevich AB, Chantsev AV, Raspopova EA, Kolomiets AA.
(2012). The diagnostic value of tribological study of the knee
joint. Genius of orthopedics. No. 2. Pp. 102-105.
Shanitsin IN, Ivanov AN, Bazhanov SP, Ulyanov VYu, Nor-
kin IA, Ninel VG, Puchin’yan DM. (2013). Methods of studying
measurements in the spinal cord with traumatic injuries of the
peripheral nerve. Regional circulation and microcirculation.
No. 1 (49). Pp. 13-22
Shchenyavskaya EV, Zakharova TV. (2015). Method of synchro-
nization of signals of magnetoencephalograms and myograms.
Systems and Means of Informatics. Vol. 25. 4. P. 101-113
Shilko SV, Ermakov SF. (2008). The role of the liquid phase and
porous structure of cartilage in the formation of biomechanical

Nikolay V. Dorofeev etal.
BIOSCIENCE BIOTECHNOLOGY RESEARCH COMMUNICATIONS FORMATION OF THE CONTROL SIGNALS BASED ON APPLICATION OF THE NEURAL NETWORK APPROACHES 369
properties of joints. Part 1. Russian Journal of Biomechanics.
12. No. 2. P. 31-40
Sinitskaya EYu, Gribanov AV. (2014). Brain potentials associ-
ated with motion. Human Ecology. 1. P. 49-59
Sobolev VI, Popov MN, Anyukhina AV. (2017). The method of
circular training as an effective way to correct the spinal col-
umn exibility in children of primary school age. Problems of
Modern Pedagogical Education. No. 54. P. 227-238
Su anova GZ, Shapkin AG. (2014). Damage to the nervous tis-
sue. Mechanisms, models, methods of estimation. M.: Publish-
ing House of RAMS. P. 288
Suslov AA, Ermakov SF, Beletsky AV, Shilko SV, Nikolaev VI.
(2008). The role of the liquid phase and porous structure of car-
tilage in the formation of biomechanical properties of joints.
Part 2. Russian Journal of Biomechanics. 12. No. 4. P. 33-39
Tuktamyshev VS, Bezmaternykh VV. (2014). Modeling the
in uence of intra-abdominal pressure on the loading of the
spinal column. Modern problems of science and education. 3.
P. 704-709
Vengerova NN, Solovyova IO. (2008). In uence of training
loads on the spine of gymnasts-artists. Health - the basis of
human potential: problems and ways to solve them. T. 3.1. S.
45-47
Voznesenskaya TG. (2006). Back pain: neurologist’s view. Con-
silium Medicum. 8. No. 2. P. 75-79
Yezhov MYu, Berendeev NN, Petrov SV. (2013). Mathematical
model of the development of changes in articular tissues with
different intensity of physical activity. Fundamental issled-
voaniya. No. 7. S. 550-554
Zakharova TV, Karpov PI, Bugaevsky V.M. (2016). Localiza-
tion of the source of activity in solving the inverse problem
of magnetoencephalography // Applied Mathematics and
Informatics. Proceedings of the Faculty of the IOM Faculty of
Moscow State University Lomonosov Moscow State University.
Moscow. 12-25
Zakharova TV, Nikiforov SYu, Goncharenko MB, Dranishniki
MA, Klimov GA, Khaziakhmetov MSh, Chayanov NV. (2012).
Methods of Signal Processing for Localization of Irreplaceable
Areas of the Brain. Systems and Means of Informatics. Vol. 22.
No. 2. P. 157-175
Zakharova TV, Shemirova AA. (2016). Methods of nding the
reference points of cyclic non-stationary signals. Bulletin of Tver
State University. Series: Applied Mathematics. No 3. P. 47-58
Zubareva EA. (2011). Determination of the functional condi-
tion of joints in horses in conditions of training and testing.
Omsk Scienti c Bulletin. No. 1 104. Pp. 165-169