
Biomedical
Communication
Biosci. Biotech. Res. Comm. 11(2): 270-276 (2018)
On the use of brushless digital DC motor and fuzzy logic
controller for hearts left ventricular assist device (VAD)
Donya Nias
1
, Mohammad H. Fatehi
2
and Hassan Masoumii
2
1
Department of Electronic Engineering, Kazerun Branch, Islamic Azad University, Kazerun, Fars, Iran
2
Department of Electronic Engineering, Faculty of Engineering, Kazerun Branch, Islamic Azad University,
Kazerun, Fars, Iran
ABSTRACT
The developments of technology and increase in clinical requirements have caused creation of a novel type of blood
pump. The present study has been conducted using controlled brushless DC motor and fuzzy logic for hearts left
ventricular assist device. We have used a fuzzy logic system based on a mathematical one that analyzes analog input
values in terms of logic variables which can take on continuous values between 0 and 1 in contrast to classical or
digital logic. This system operates on discrete values of either 1 or 0. The clinical system includes a blood pump, a
centrifugal pump, a brushless DC motor, a solenoid, power supply and control. In order to control the ventricular
blood pressure and the blood volume (cardiac output), a fuzzy logic controller has been used. The method applied
in this research provides conditions for the designer to describe the status in a few words clearly to make control
decision based on linguistics structures. The structures and rules could be developed or changed by the physician for
personal use. Permanent magnet brushless direct current motor (BLDC) has been the main element in majority of ven-
tricular assist devices (VAD) development. To this end, an Implantable Centrifugal Blood Pump has been developed at
the Institute Dante Pazzanese of Cardiology (IDPC) to assist patients with cardiovascular diseases. In order to make a
high quality controller, it is important to use reliable virtual BLDC model. Permanent Magnet Synchronous Machine
(PMSM) has implemented the differential equations for this motor using a state-space model. This could be the main
contribution of this study. The results obtained from this study could be applied by further studies in order to enhance
the motor model. Therefore, the results could lead to reliable simulations for the proposed controller.
KEY WORDS: LEFT VENTRICULAR ASSIST DEVICE, BRUSHLESS DC MOTOR, FUZZY LOGIC, CARDIOVASCULAR DISEASE
270
ARTICLE INFORMATION:
Received 16
th
March, 2018
Accepted after revision 19
th
June, 2018
BBRC Print ISSN: 0974-6455
Online ISSN: 2321-4007 CODEN: USA BBRCBA
Thomson Reuters ISI ESC / Clarivate Analytics USA and
Crossref Indexed Journal
NAAS Journal Score 2018: 4.31 SJIF 2017: 4.196
© A Society of Science and Nature Publication, Bhopal India
2018. All rights reserved.
Online Contents Available at: http//www.bbrc.in/
DOI: 10.21786/bbrc/11.1/12

Donya Nias et al.
INTRODUCTION
The brushless motors (BLDC) have been the main com-
ponent of propulsion in the creation of majority of the
Ventricular Assist Devices (VAD). Among the features
used in implantable pumps, no brush is existed and this
could avoid the wear observed in other electrical motors
and implantable systems. The operation at high rota-
tional speeds and small size are also factors that support
this use (Fonseca 2003, Bock et al., 2008, Leao et al.,
2012, Viswajith et al., 2017).
The three-phase brushless electric motor has a syn-
chronous permanent magnet on the rotor and coils on
the stator located, usually star connected with inverter
control for bridge-type H (Bock et al., 2008; Fonseca
2003; Hsieh & Liao 2010). The operation of a BLDC is
accomplished through strategic switching of the coils, as
well as in a stepper motor. The switching is performed
by a circuit that supplies current to the motor coils as a
function of rotor position. The phase current of a BLDC,
usually rectangular, is synchronized with the Back Elec-
tromotive Force (BEMF) to produce maximum torque
and constant speed, with the trapezoidal BEMF as the
main feature of control (Shao 2003; Shao et al., 2003
Leao et al., 2012).
The MATLAB/Simulink software was employed as
virtual environment for simulation, since it allows data
and results integration with other software including
Comsol Multiphisycs to model ICBP. The dynamic model
is required to study transients of the motor drive sys-
tem and steady state. The immediate currents are cru-
cial for power computation and electromagnetic torque
is underlying for drive system performance evaluation.
These features become a signi cant factor in uses such
as VAD and are different from industrial appliances that
may not be underlying (Krishnan, 2010).
This study has been divided into two main parts: the
rst part consist of mathematical modeling that Simulink
block uses to represent BLDC motor and the second part
describes the virtual implementation with help of Matlab
/ Simulink blocks diagram to represent the electrome-
chanical actuator. Moreover, the main objective of this
study is to apply the block Permanent Magnet Synchro-
nous Machine (PMSM) to present the actuator from ICBP
to begin researches current and speed control (Paraspour
& Hanitsch 1994; Guyton C, 1986).
The dynamics of the aortic valve plays a critical role
in the understanding of heart failure and its treatment
using the continuous ow left ventricular assist device
(LVAD). Maintaining proper and active dynamics of the
aortic valve is important when the LVAD is used as a
bridge-to-recovery treatment. This treatment requires
that the LVAD pump control must be adjusted so that a
proper balance between the volume of blood contributed
through the aortic valve and that contributed though
the pump must be maintained. That is, the pump control
must be adjusted so that the pump does not take over the
entire pumping function in the circulatory system but
instead must share with the left ventricle in ejecting the
total amount of blood needed by the circulatory system
(Viswajith et al., 2017).
VENTRICULAR ASSIST DEVICE (VAD)
A ventricular assist device (VAD) is mechanical pump
supporting heart function and blood ow in people with
heart insuf ciency. The devices could support the func-
tion of the left, right, or both heart ventricles. Ventri-
cles are the lower chambers of human heart. The VAD
includes tubes to carry blood out of heart and send it
to blood vessels, a power source, and a control unit to
FIGURE 1. The block diagram BLDC
BIOSCIENCE BIOTECHNOLOGY RESEARCH COMMUNICATIONS ON THE USE OF BRUSHLESS DIGITAL DC MOTOR AND FUZZY LOGIC CONTROLLER 271
Donya Nias et al.
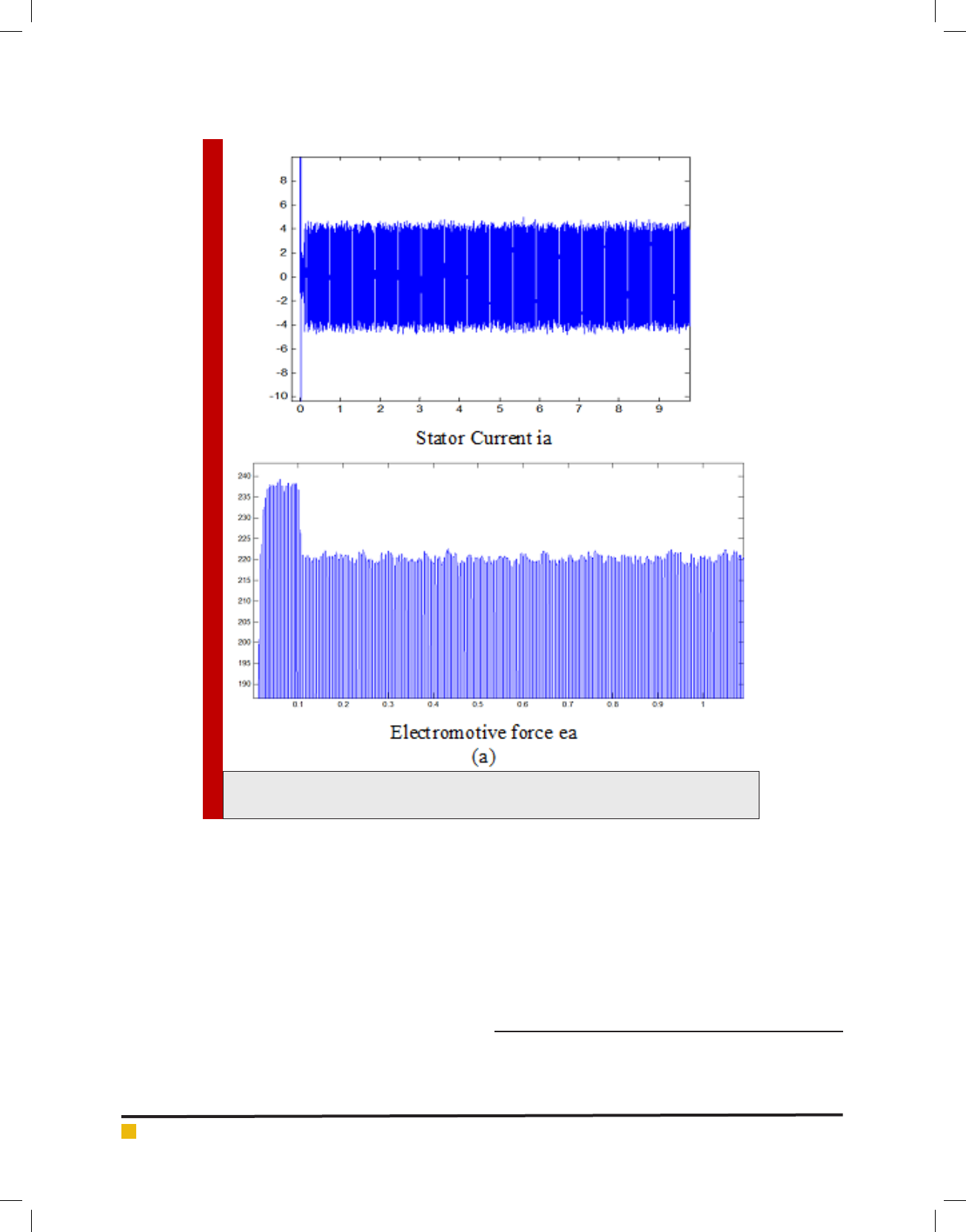
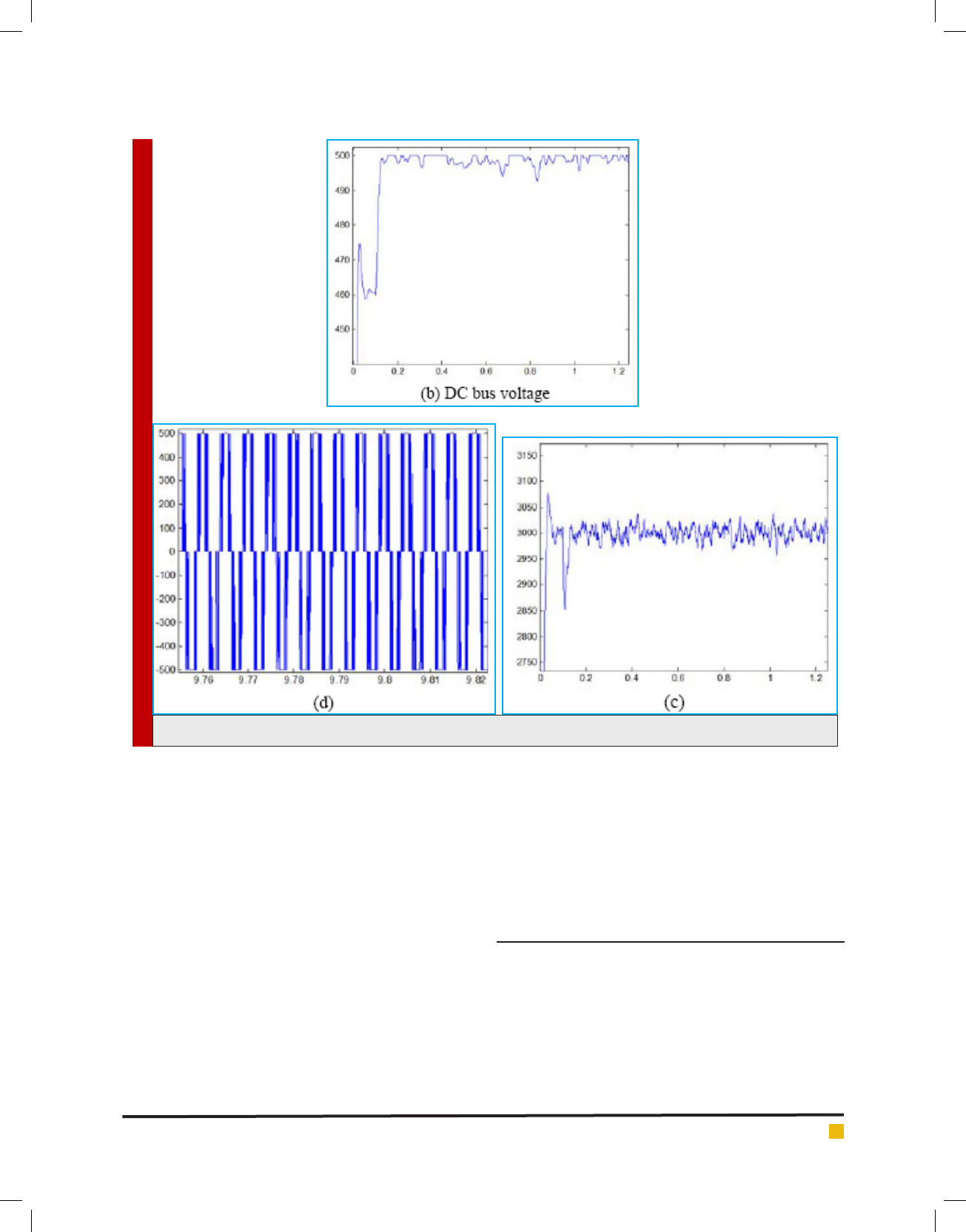
FIGURE 2. Outputs of waveform; (a) Stator Current & Electromotive force; (b) DC bus Voltage;
(c) Rotor speed; (d) Voltage
monitor device function. The device may be used to sup-
port the heart until it recovers, to support the heart while
waiting for a heart transplant, or to help heart work bet-
ter in case of being eligible for a heart transplant (Para-
spour & Hanitsch 1994, Goldowsky 2004,Patel 2005, Gill
et al 2006).
Surgery is required to connect the VAD to heart. The
surgery will be performed in a hospital. Patients will
have general anesthesia and will not be awake or feel
pain during the surgery. The patients will receive anti-
clotting medicine through an intravenous (IV) line in
arm. A breathing tube connected to a ventilator will help
patients’ breath. A surgeon will open the chest and con-
nect heart’s arteries and veins to a heart-lung bypass
machine. The surgeon will place the pump in the upper
part of belly wall and connect the pump to heart using a
tube. Another tube will connect the pump to one of the
major arteries. The VAD will be connected to the con-
trol unit and power source outside the body. When the
heart-lung machine is switched off, the VAD will sup-
port blood ow and take over heart’s pumping function,
(Libre etal.,2011; Nicolaescu 2012).
BRUSHLESS DC MOTOR (MOTOR DESIGN)
The brushless motors (BLDC) could be the main compo-
nent of propulsion in the development of majority of the
Ventricular Assist Devices (VAD). Among the features
272 ON THE USE OF BRUSHLESS DIGITAL DC MOTOR AND FUZZY LOGIC CONTROLLER BIOSCIENCE BIOTECHNOLOGY RESEARCH COMMUNICATIONS
Donya Nias et al.
used in implantable pumps, no brush is existed and this
could avoid the wear observed in other electrical motors
and implantable systems. The operation at high rota-
tional speeds and small size are also factors that support
this use .The three-phase brushless electric motor has a
synchronous permanent magnet on the rotor and coils
embedded on the stator, usually star connected with
inverter control for bridge-type H.
The BLDC operation is accomplished through strate-
gic switching of the coils, as well as in a stepper motor.
The switching is performed by a circuit that supplies
current to the motor coils as a function of rotor position.
The phase current of a BLDC, usually rectangular, is syn-
chronized with the Back Electromotive Force (BEMF) to
produce maximum torque and constant speed using the
trapezoidal BEMF as the main feature of control . The
sensor less control was used as redundant position rotor
control in absence of other position sensors as source of
failures and should be avoided in implantable devices.
Lack of using others sensors could reduce the number of
wires for motor control and this is the fact that is associ-
ated with the surgical practice and could reduce post-
operative complications, ( Andrade et al., 2008 Andrade
2010).
ANALYSIS OF THE SIMULINK MODEL
The model performed in MATLAB/SIMULINK used
blocks of the Sim Power Systems toolbox. The BLDC was
simulated using a block of Permanent Magnet Synchro-
nous Machine (PMSM) with a trapezoidal back electro-
motive force (BEMF) signal (Leão et al., 2009). The BLDC
is connected to an inverter and is supplied by a variable
source of Direct Current (DC). The source is adjusted by
a Proportional Integral (PI) control with feedback of the
FIGURE 2. (Continued)
BIOSCIENCE BIOTECHNOLOGY RESEARCH COMMUNICATIONS ON THE USE OF BRUSHLESS DIGITAL DC MOTOR AND FUZZY LOGIC CONTROLLER 273

Donya Nias et al.
motor speed. The rotor position information is toggled
between hall signal and sensor less estimator in 0.5sec
of the simulation time. Hence, the behavior of redundant
system could be simulated, if the information of rotor
position is given by the hall sensor to stop operation.
Figure 1 has illustrated block diagram to study the
dynamic of the actuator electromechanical of ICBP. The
LPF was adjusted to 500Hz of cut-off frequency for the
speed of 2000rpm and 300Hz of cut-off frequency for
the speed of 1500rpm.
Figure 2 has presented the output waveform of the
simulated model.
ANALYSIS OF FUZZY CONTROLLER
A heart assist device coupled with the natural heart
forms a complicated system. In fact, there are two con-
trol strategies. The heart assist system pumps either
synchrony to the heart rhythm or asynchrony. In both
cases, the systolic pressure and the blood volume ow
(cardiac output) are considered as controlling parame-
ters. The controlling parameters are the motor speed and
the switching frequency of the solenoid. In the diastolic
phase, the motor active length will be reduced due to the
axial rotor movement. The speed and the motor current
are increased and the losses are decreased. An additional
speed control during this time improves the motor ef -
ciency. The synchrony pumping is relatively simple to
control, but the heart assistance is not fully effective
and the mobility of the patient is restricted (Paraspour &
Hanitsch 1994; Guyton 1986, Zadeh 1987, Zadeh L. A.,
1978, Zadeh 1987, Pedrycz 1989).
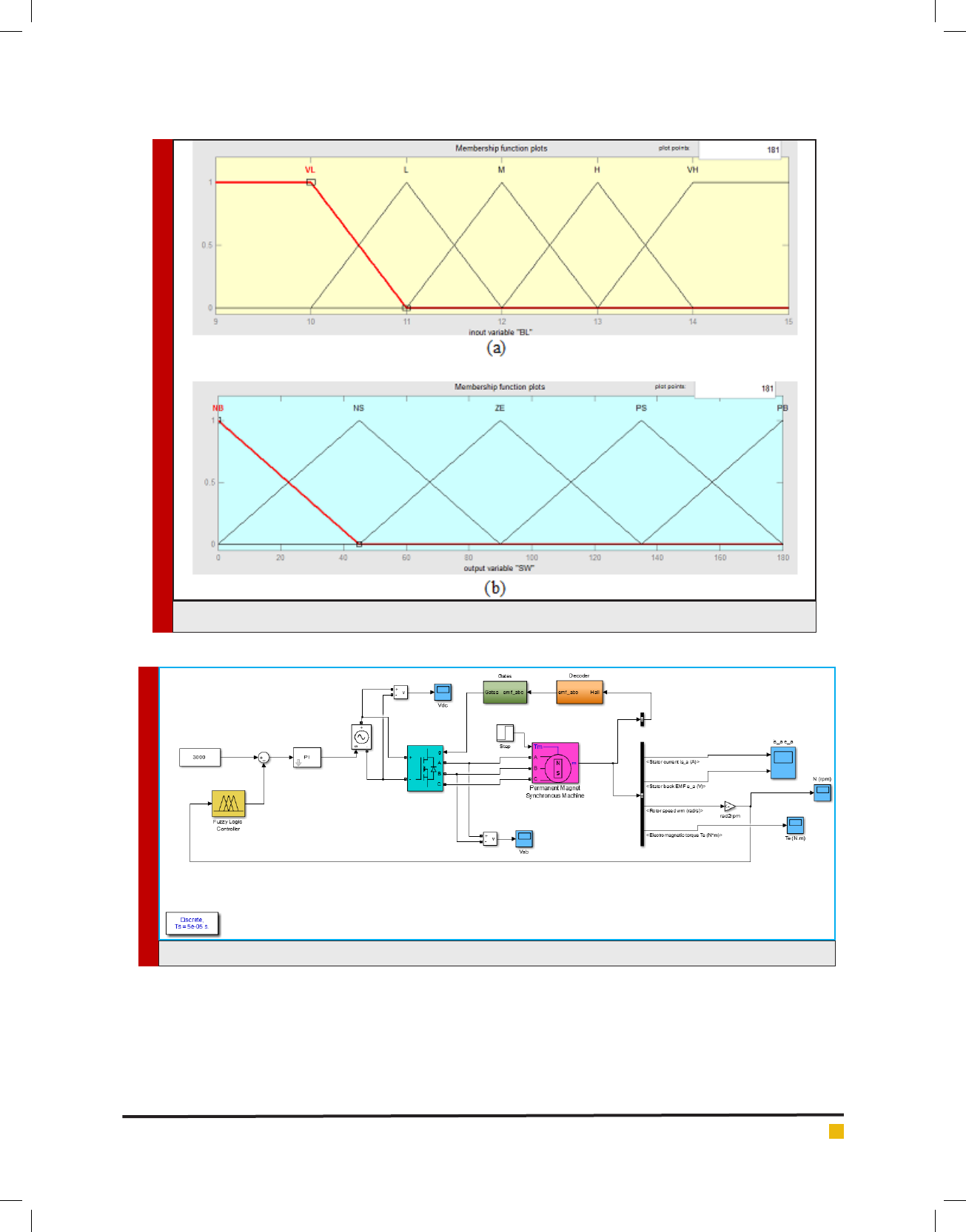
The fuzzy controller has two input variables including
blood pressure and cardiac output. The output variables
are set speed of the actuator. For purpose of fuzzi cation
of variables in each case, ve linguistic terms (very low,
low, medium, high and very high) are de ned in Figure
3. The membership function of the heart parameters is
shown in Figure 4.
Figure 5 illustrates the block diagram to analyze the
dynamics of Block diagram BLDC when using fuzzy
block.
CONCLUSION
The present study has presented and analyzed an elec-
tromechanical left ventricular heart assist device driven
by a brushless D.C motor and controlled by the fuzzy set
theory. For an implantable device, various restrictions
should be considered such as xed low voltage, constant
magnetic ux, and upper limit of current density to avoid
signi cant temperature increase and low volume require-
ments. According to the equations of the electromechani-
cal system and the above mentioned restrictions, an opti-
mization method has been developed in this study.
The optimization method has been used to design
and make prototype drive and its electronic control. In
combination with the blood circulation, the heart assist
device is a nonlinear and multivariable system. In this
study, the linguistic description of the system, the opti-
mization of the fuzzy sets and the development of the
control rule basis have been realized with regard to the
physiological parameters. The fuzzy control algorithm
has been proved by an off-line simulation enhanced by
the on-line and interactive optimization. The use of the
fuzzy logic provides higher robustness and reliability for
the medical device, since a fuzzy controller tolerates a
certain imprecision in dealing with the controlling prob-
lem.
The electromotive and mechanical parameters associ-
ated with BLDC motor have provided simulation results
according to the literature. Current values are consist-
ent with the data given by the manufacturer in its cata-
log. At the same time, the real time loads of the model
show power values compatible with the application of
a ventricular assist device (VAD). The PMSM block was
appropriate to present the actuator ICBP and allowed
Very HighHighMediumLowVery lowCardiac
output
Negetive SmallNegetive SmallNegetive SmallNegetive SmallNegetive BigVery low
ZeroZeroZeroNegetive SmallNegetive SmallLow
Posetive SmallPosetive SmallZeroZeroNegetive SmallMediume
Positive BigPosetive SmallPosetive SmallZeroNegetive SmallHigh
Positive BigPositive BigPosetive SmallZeroNegetive SmallVery High
FIGURE 3. Basis of fuzzy logic
274 ON THE USE OF BRUSHLESS DIGITAL DC MOTOR AND FUZZY LOGIC CONTROLLER BIOSCIENCE BIOTECHNOLOGY RESEARCH COMMUNICATIONS
Donya Nias et al.
FIGURE 4. (a),(b) heart parameters membership function
FIGURE 5. The block diagram BLDC
development of a controller. Further studies should be
conducted to enhance and improve the dynamic model
of control for better power values. Moreover, motor
dynamometer tests should be applied for purpose of
validating the model dynamic.
REFERENCES
Andrade, J. Leme A.J, Fonseca J, Bock E, Legendre D, Nicolosy
D (2008) Últimos Avanços nos Dispositivos de Assistência Ven-
tricular Brasileiros, 5° COLAOB Congresso Latino Americano
de Orgãos Arti ciais e Biomateriais.
BIOSCIENCE BIOTECHNOLOGY RESEARCH COMMUNICATIONS ON THE USE OF BRUSHLESS DIGITAL DC MOTOR AND FUZZY LOGIC CONTROLLER 275

Donya Nias et al.
Bearnson G.B, Jacobs G.B, Kirk J (2006) Heart Quest Ventricu-
lar Assist Device Magnetically Levitated Centrifugal Blood
Pump,,Journal compilation, International Center for Arti cial
Organs and Transplantation
Biscegli A.J (2010) Introdução ao Projeto Temático, 1° Encon-
tro Sobre Sistemas Propulsores Eletromagnéticos Implantáveis
para Dispositivos de Assistência Circulatória Sanguínea Uni e
Biventricular Ou Coração Arti cial. São Paulo.
Biscegli A.J, Sousa J.E, Ohashi Y, Nose Y (1997) Flow visu-
alization studies to improve the spiral pump design, Arti cial
Organs, vol. 21, no. 7, pp. 680-685.
Bock J. E, Ribeiro A, Silva M, Antunes P, Fonseca J, Legendre
D (2008) New centrifugal blood pump with dual impeller and
double pivot bearing system: Wear evaluation in bearing sys-
tem performance tests and preliminary hemolysis tests, Arti -
cial Organs, vol. 32, no. 4, pp. 329-333.
Fonseca J.W.G. (2003) Técnica Sensorless para O Acionamento
de Motores Brushless DC Aplicados Em Circulação Arti cial.
Guyton C (1986) Textbook of Medical Physiology, vol. 1.
Hsieh M, Liao H (2010) A Wide Speed Range Sensor less Con-
trol Technique of Brushless DC Motors for Eletric Propulsors,
Journal of Marine Science and Technology, vol. 18, no. 5, pp.
735-745.
Leão T.F, Fonseca J.W.G, Andrade A.J.P, Bock E.G.P (2009)
Desempenho In Vitro do atuador eletromecânico da bomba de
sangue centrífuga implantável, Mathworks.
Libre F, Martinez N, Nogarede B (2011) Linear tubular switched
reluctance motor for heart assistance circulatory, IEEE
Michael G. M (2004) The Worlds Smallest Magnetic-bearing
Turbo Pump, international center for Arti cial Organs and
Transplantation
Nicolaescu M.A (2012) Rotary Electrical Motors Used Medical
Industry, 978-1-4673-1172-4/12/$31.00, IEEE
Paraspour N, Hanitsch R (1994) Fuzzy Controlled Brushless D.C.
Motor For Medical Applications,0-7803-1328-3/94$03.00,
IEEE
Patel S.M, Penrose H.W, Allaire P.E, Zongli L (2005) An Initial
Investigation of Insulation Fault Effects on LVAD Motor Per-
formance, IEEE
Pedrycz W (1989) Fuzzy Control and Fuzzy Systems, John
Wiley and sons, Inc.
Shao J (2003) Direct Back EMF Detection Method for Sensor-
less Brushless DC (BLDC) Motor Drives.
Shao J, Nolan D, Teissier M, Swanson D (2003) A novel micro-
controller-based sensorless brushless DC (BLDC) motor drive
for automotive fuel pumps, Transactions on Industrial Appli-
cations, vol. 39, no. 6, pp. 1734-1740.
Tarcisio F, Bock E, Fonseca J (2012) Modeling Study of an
Implantable Centrifugal Blood Pump Actuator with Redundant
Sensorless Control, March, pp.11-13.
Viswajith S. Vasudevan, Yu Wang, Marwan A.S (2017) Aortic
valve dynamics and blood ow control in continuous ow left
ventricular assist devices, IEEE, 10.23919/ACC.2017.7963158,
24-26.
Zadeh L.A (1978) PRUF- a meaning representation language
for natural language, Int. J. Man- Machine Studies, vol. 10,
pp. 395-460.
Zadeh L.A (1987) Fuzzy Sets and Applications: Selected Papers,
1987, John Wiley and sons, Inc.
Zadeh L.A (1987 a ) Linguistic variables approximate reason-
ing and dispositions, Int. J. Man-Machine Studies, vol. 10, pp.
395-460.
276 ON THE USE OF BRUSHLESS DIGITAL DC MOTOR AND FUZZY LOGIC CONTROLLER BIOSCIENCE BIOTECHNOLOGY RESEARCH COMMUNICATIONS